This topic contains the following sections.
VisionPro includes a number of sample QuickBuild applications to demonstrate the use of range images. The applications exist as sample Jobs available from the Navigator pane, as shown:
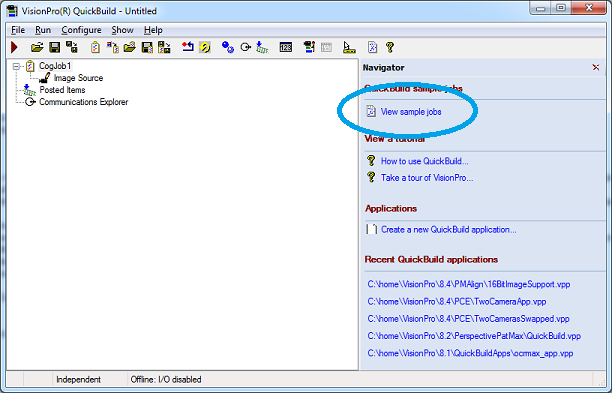
Click View sample jobs to list all sample Jobs by function.
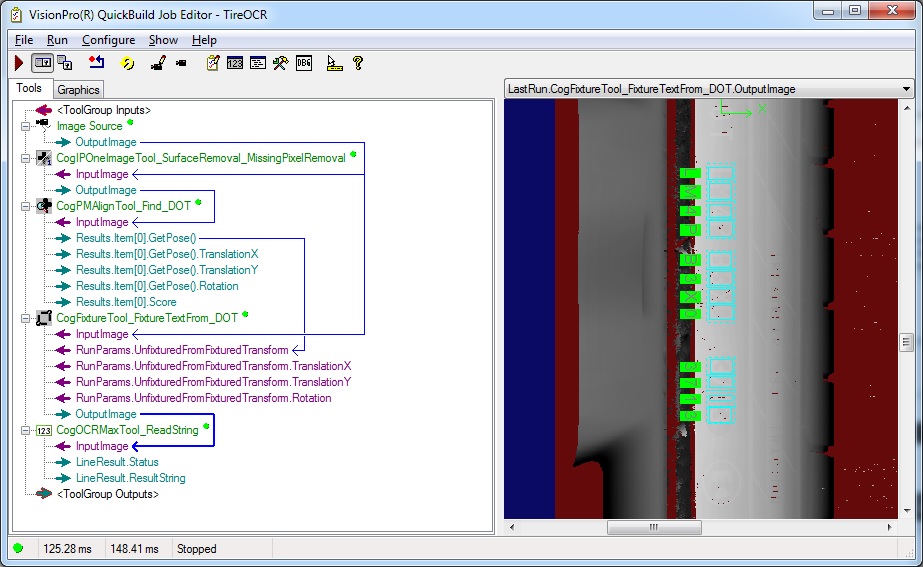
The Tire OCR sample Job demonstrates how to use range images and vision tools such as PMAlign and OCRMax to read the various raised characters from the sidewall of rubber tires.
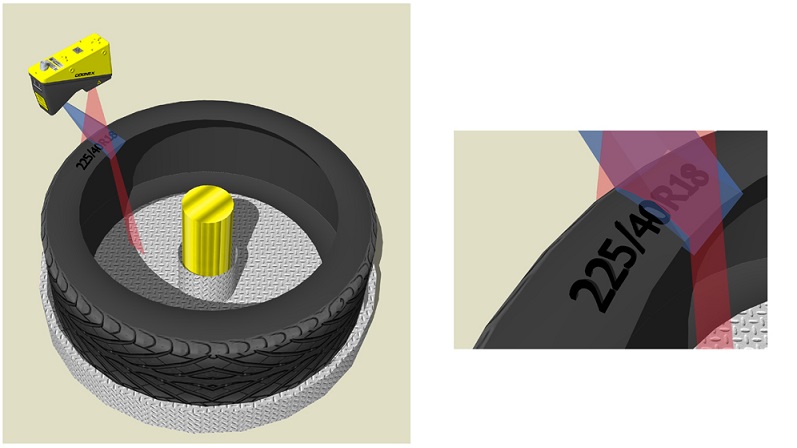
The Job ultimately produces a result string as shown:
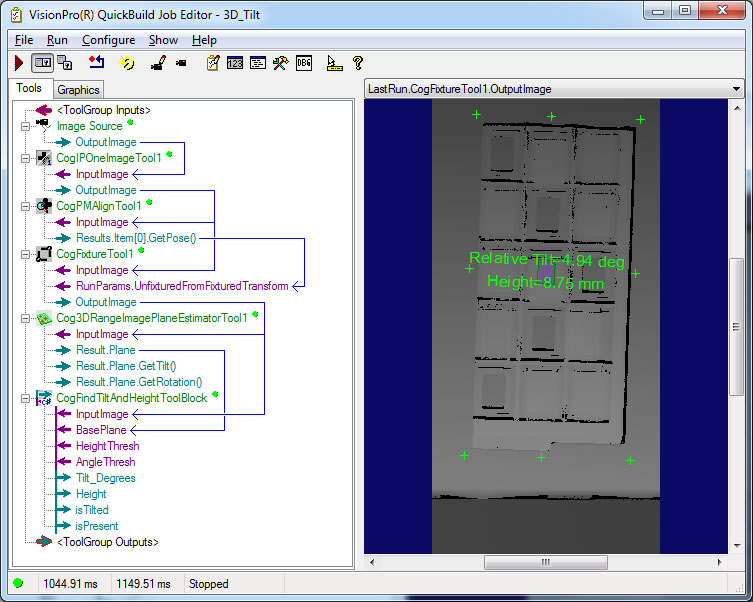
The 3D Tilt sample Job uses 3D range image height calculation, 3D range image plane estimation, and a built-in 3D plane angle script to find the relative tilt and height of a part with respect to the underlying surface.
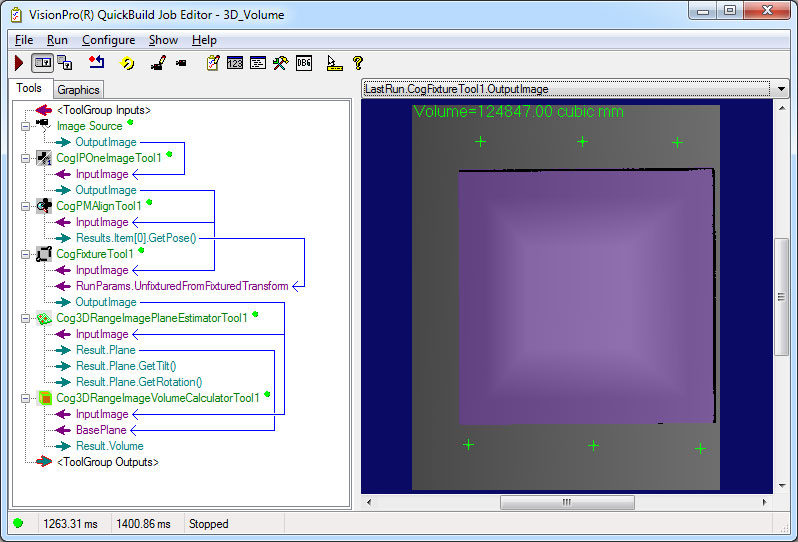
The 3D Volume sample Job uses 3D volume calculation to find the volume of an object.
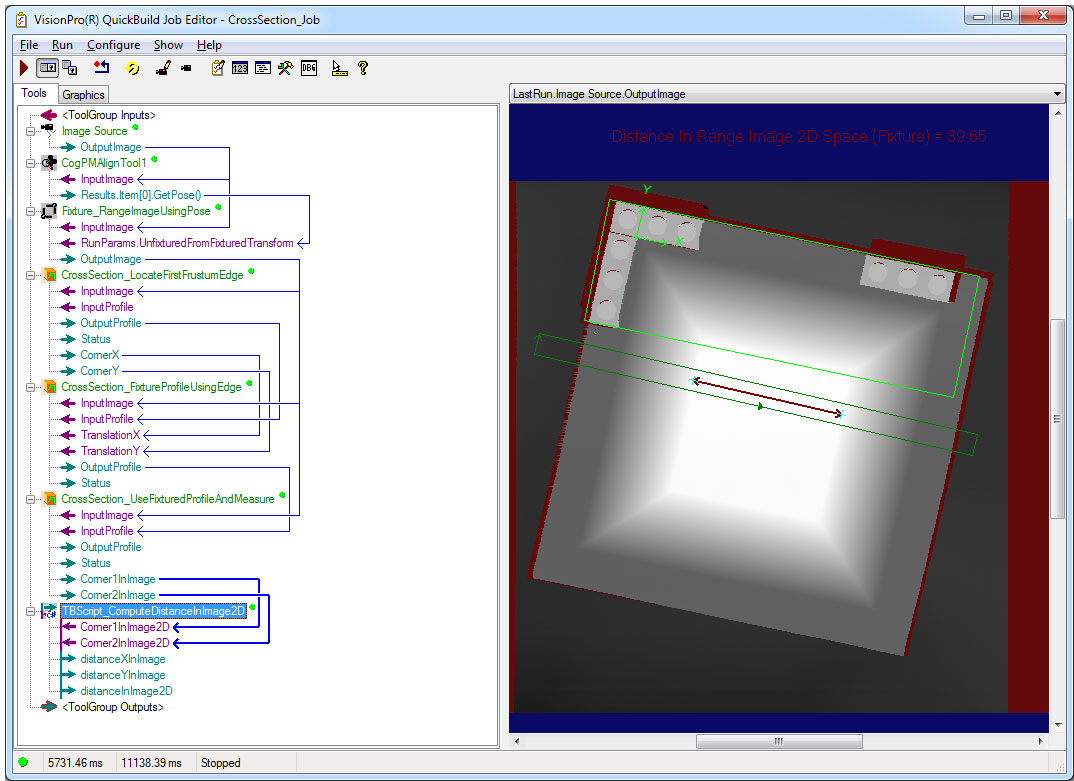
The Cross Section sample Job uses 3D cross section analysis on a frustum, or portion of a solid pyramid. The Job locates consistent features in order to create a fixture for the placement of multiple Cross Section tools. The first Cross Section tool creates a profile which is then shared with additional tools.
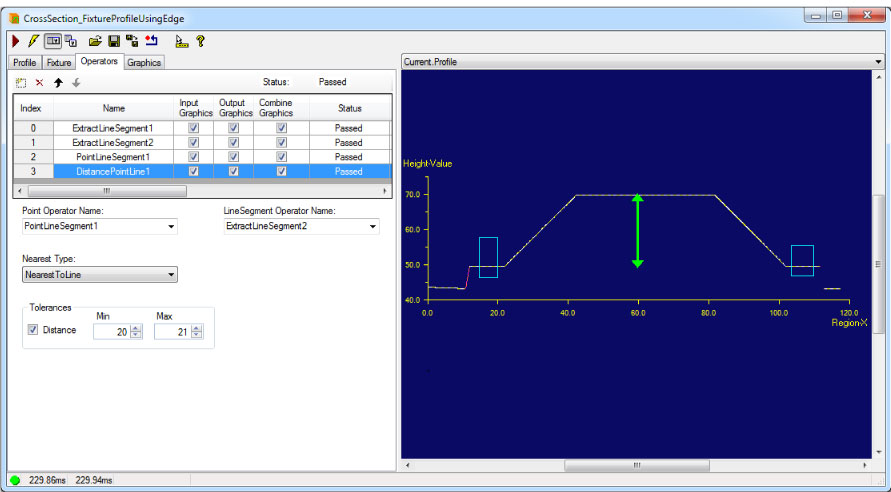
Each Cross Section tool employes a variety of operators on the profile. For example, the following figure shows a set of operators configured to calculate the height between the first plane and the top of the frustrum:
The sample Job concludes by using a CogToolBlock to calculate the distance across the top of the frustrum, as shown:
The Working with RangeWithGrey images sample Job demonstrates how to decouple the 3D range image and greyscale intensity image from a single acquisition using the RangeWithGrey mode of the displacement sensor (DS).
The Job contains a Cog3DRangeGreySplitterScript that accepts a single ICogImage containing data for a 3D range image and the intensity image data from a DS unit, as shown:
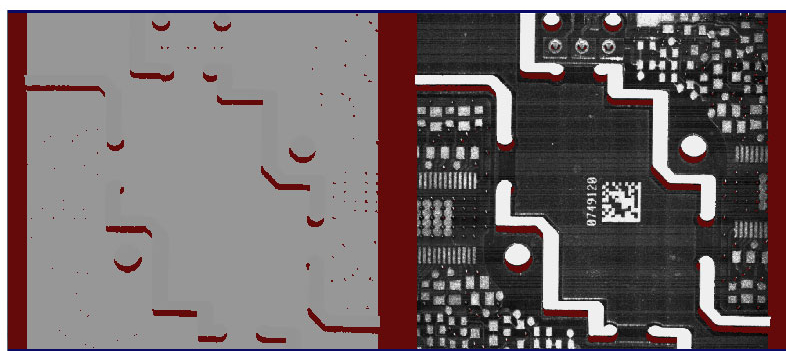
The Job uses the Cog3DRangeGreySplitterScript to generate a CogImage16Range and a CogImage16Grey image, and the CogPixelMapTool to generate a CogImage8Grey image.
The remainder of the Job decodes the symbol in the intensity image while analyzing a cross section from part of the 3D range image.
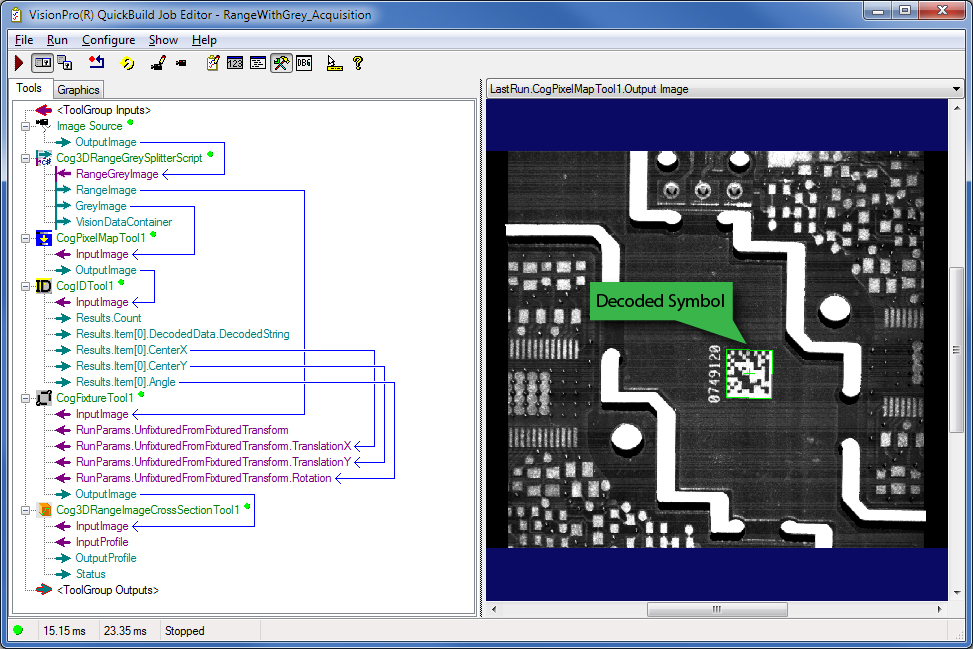
The Cog3DRangeGreySplitterScript tool block can be used in your own application.