InspectEdgeTrainBeadPath
La función InspectEdgeTrainBeadPath se utiliza para encontrar el centro de una característica de cordón en un borde y crea una polilínea que sigue la trayectoria del cordón detectado. La trayectoria polilínea creada por la herramienta puede ser utilizada como entrada por otras Funciones de inspección de bordes InspectEdge, como la función InspectEdgeWidth, para determinar si hay defectos de posición, defectos de anchura o huecos en el cordón.
InspectEdgeTrainBeadPath Descripción general
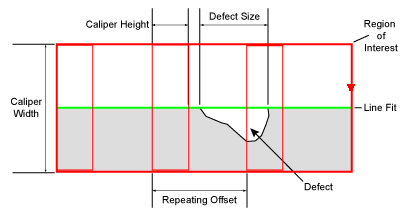
Una trayectoria de cordón consiste en un par de bordes continuos que definen el límite entre dos regiones que se diferencian por píxeles de distinto valor (la trayectoria no tiene que tener siempre la forma de un bucle). Una trayectoria de cordón se refiere normalmente a una trayectoria de cola o tinta o a un cordón de soldadura que se caracteriza por su anchura o grosor y su ubicación. La función InspectEdgeTrainBeadPath junto con las otras funciones InspectEdge pueden ser utilizadas en aplicaciones de rastreado de rebordes en las que las trayectorias de cordón varían de una imagen a otra, así como para verificar si una trayectoria de cordón se encuentra siempre en la misma ubicación.
En una aplicación de rastreado de rebordes, la función InspectEdgeTrainBeadPath junto con una función InspectEdge y una función InspectEdgeWidth permiten verificar si el trazado de una trayectoria de cordón es uniforme, no siendo este ni demasiado grueso ni demasiado fino. Las funciones crean una línea multisegmentada que define una trayectoria a lo largo del cordón y, a continuación, determinan si la trayectoria de cordón presenta zonas que son demasiado gruesas o finas o incluso partes en las que no hay ningún cordón.
En una aplicación de rastreado y localización de una trayectoria de cordón, estas mismas funciones son capaces de verificar si la trayectoria de cordón se encuentra siempre en la misma ubicación presentando el mismo grosor sin variaciones de posición a lo largo de la trayectoria.
InspectEdgeTrainBeadPath Entradas
| Parámetro | Descripción | ||||||||||||||||||||||
|
Imagen |
Este parámetro debe hacer referencia a una celda de la hoja de cálculo que contiene una estructura de datos de Imagen; por defecto, este parámetro hace referencia a A0, la celda que contiene la estructura de datos. Este parámetro puede hacer también referencia a otras estructuras de datos de Imagen, como las devueltas por las funciones de Imagen Funciones de Vision Data Access o Funciones de transformación de coordenadas. |
||||||||||||||||||||||
|
Elemento posicionador |
Define la región de interés (RDI) en relación con una entrada de Fixture [Elemento posicionador] o la salida del sistema de coordenadas de imagen de una función de Vision Tools. La configuración de la RDI con relación a un elemento posicionador hace que si se gira o desplaza el elemento posicionador, se girará o desplazará en consonancia la RDI, manteniéndose fija la relación entre ambos. El valor de configuración predeterminado es (0,0,0), la esquina superior izquierda de la imagen.
|
||||||||||||||||||||||
|
Región |
También conocida como región de interés (RDI), especifica la región de la imagen que se somete a un análisis de bordes; crea un Regiones rectangulares en modo gráfico interactivo que pueden ser transformadas y giradas. Cuando este parámetro está seleccionado, al pulsar el botón Maximizar región
|
||||||||||||||||||||||
|
Nota: Los parámetros Elemento posicionador y Región deben estar definidos dentro de los límites de la imagen; de lo contrario, la función devolverá #ERR.
|
|||||||||||||||||||||||
|
Región o trayectoria externa |
EditMaskedRegionEspecifica Referencias de celda a una celda de la hoja de cálculo que contiene una función Annulus, Region, EditAnnulus, EditMaskedRegion, EditPolylinePath o EditRegion. Cuando se utiliza este parámetro, la función ignora los ajustes de Región y Elemento posicionador e inspecciona el área de la imagen especificada por la región a la que se hace referencia.. Nota:
|
||||||||||||||||||||||
|
Calibre |
Especifica la matriz Calibre, dentro de la región de interés (RDI), que se utilizará para definir el tamaño de los defectos y/o huecos detectables. El tamaño del defecto o hueco detectables se determina a partir del número de bordes que pueden ser detectados, el cual se determina a su vez por el número de calibres situados a lo largo del borde. Los calibres se visualizan dentro de la RDI en forma de rectángulos rojos, mientras que los bordes detectados dentro de los calibres se visualizan en verde cuando se resalta la celda que contiene InspectEdge o se puesto el parámetro Mostrar a Mostrar todo. Nota: Según el tipo de defecto que se está examinando, pueden colocarse los calibres de forma que se superponen. Sin embargo, cuantos más calibres se utilicen en la región de interés, tanto más aumentará el tiempo de ejecución de la función.
|
||||||||||||||||||||||
|
Contraste mínimo |
Especifica la transición de contraste mínima en escala de grises (0 a 255; por defecto = 5) para que se considere un borde. Se visualiza, para cada calibre indexado, un gráfico de respuesta de borde junto con la imagen. Los valores en el gráfico se ajustan automáticamente a una escala de valores de 0 a 100. Cuando utilice este parámetro, sírvase de este gráfico para ajustar correctamente el valor. Ejemplo - Parámetro de contraste mínimo con gráfico Nota: El gráfico de respuesta a bordes es una ventana acoplable. Para más información, consulte el tema Editor de hojas de cálculo - Gráficos.
|
||||||||||||||||||||||
|
Ancho de borde |
Especifica la distancia en píxeles (de 1 al valor de la anchura de la región; por defecto = 3) en la que produce una transición de borde. Este ajuste expresa el tamaño aproximado del operador de píxeles utilizado para filtrar las proyecciones en escala de grises antes de extraer los bordes; utilice este ajuste para filtrar el ruido de la imagen. |
||||||||||||||||||||||
|
Ajustar todos los calibres |
Especifica si han de colocarse o no todos los calibres en la RDI.
|
||||||||||||||||||||||
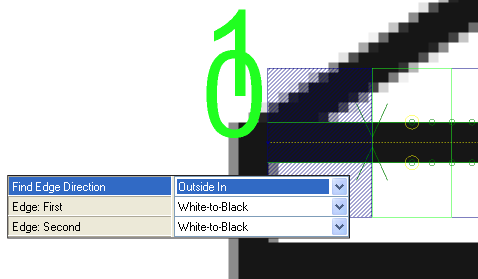
| BuscarDirecciónBorde |
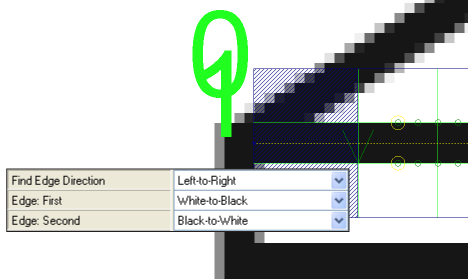
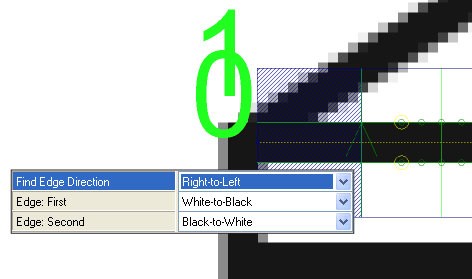
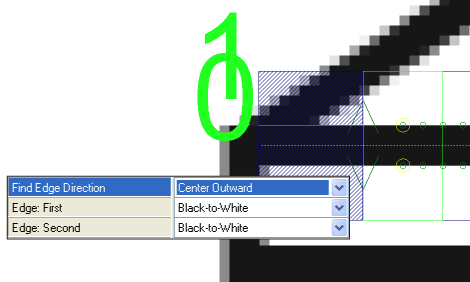
Especifica la dirección y el sentido en los que la función hará la exploración para detectar bordes. Se visualizan adicionalmente unas flechas de color verde oscuro para ilustrar gráficamente el sentido y dirección y en los que se detectará el borde. Las líneas de ajuste se etiquetarán gráficamente dentro de la imagen, señalándose la primera línea de ajuste mediante la etiqueta 0 y la segunda línea de ajuste con la etiqueta 1.
|
||||||||||||||||||||||
| Borde: Primero |
Especifica la transición de contraste del primer borde a detectar, tal como lo determina el parámetro Buscar dirección del borde.
|
||||||||||||||||||||||
| Borde: Segundo |
Especifica la transición de contraste del segundo borde a detectar, tal como lo determina el parámetro Buscar dirección del borde.
|
||||||||||||||||||||||
|
Puntuación del borde |
Especifica el modo de puntuación de bordes que se utilizará para determinar si un borde cumple o no los criterios establecidos.
|
||||||||||||||||||||||
| Entrenar |
Especifica el modo de entrenamiento de la herramienta.
|
||||||||||||||||||||||
|
Índice del gráfico del calibre |
Especifica el calibre que se visualizará en la imagen (con trazos verdes); el calibre que se visualiza por defecto es 0. |
||||||||||||||||||||||
|
Mostrar |
Especifica el modo de visualización de las superposiciones gráficas de InspectEdge sobre la imagen.
|
||||||||||||||||||||||
 de la barra de herramientas de la hoja de propiedades, se expande automáticamente la región hasta cubrir toda la imagen. La línea discontinua de color amarillo indica la dirección en la que se encontrará el borde.
de la barra de herramientas de la hoja de propiedades, se expande automáticamente la región hasta cubrir toda la imagen. La línea discontinua de color amarillo indica la dirección en la que se encontrará el borde.
InspectEdgeTrainBeadPath Salidas
|
Devuelve |
Una estructura de datos de Inspección que contiene los bordes detectados en la imagen y el número de calibres o #ERR si alguno de los parámetros de entrada no es válido. |
|
Resultados |
El número de calibres en la RDI. |