InspectEdgeForDefect
La función InspectEdgeForDefect [InspeccionarDefectosDeBorde] se utiliza para construir un modelo de borde y realizar con él un análisis avanzado de los bordes o pares de bordes devueltos por una función de inspección de bordes «InspectEdge». Estos datos se utilizan para desarrollar un encuadre de línea óptimo con el que comparar los bordes o pares de bordes encontrados y detectar defectos o brechas, como una separación con respecto al encuadre de la línea del borde.
Descripción general de la exploración con la función InspectEdgeForDefect
Después de insertar la función en la hoja de cálculo, hay que hacer una referencia a una estructura de datos de Inspección creada por una función InspectEdge. Una vez establecida la referencia a la función de inspección de bordes, se crea el modelo de borde mediante la configuración de los parámetros de la función InspectEdgeForDefect. El modelo de borde implica definir lo siguiente:
- El tipo de encuadre de línea: recta o circular.
- El tipo de borde: sencillo o par de bordes.
- El tipo de transición en el borde: de blanco a negro o viceversa.
- Los criterios de puntuación de los bordes que han de utilizarse para filtrar los bordes no deseados.
- Los criterios de encuadro de línea que han de utilizarse para filtrar los bordes no deseados que se apartan del encuadre de línea.
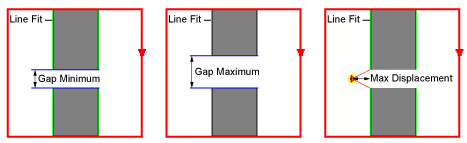
- Las tolerancias a defectos y/o huecos que puedan encontrarse.
Una vez establecido el modelo de borde, la función comparará los candidatos a borde con dicho modelo de borde e informará de las diferencias con respecto al modelo encontradas.
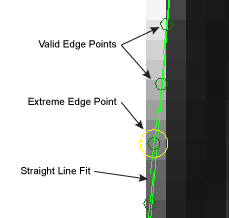
Ejemplo - Borde conforme con el encuadre de línea recta
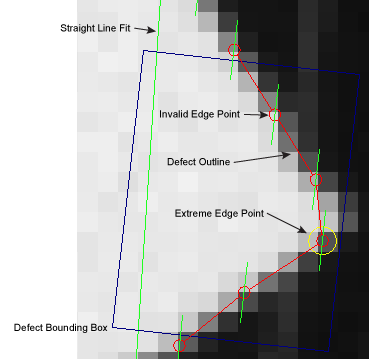
Ejemplo - Borde no conforme con el encuadre de línea recta
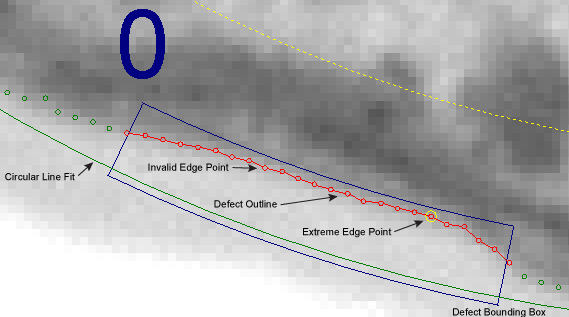
Ejemplo - Borde no conforme con el encuadre de línea circular
InspectEdgeForDefect Entradas
| Parámetro | Descripción | ||||||||||||||||||||||||||||||||||||||||
|
InspecciónDeBordes |
Especifica una referencia a una celda de la hoja de cálculo que contiene una estructura de datos de Inspección válida devuelta por una función InspectEdge. |
||||||||||||||||||||||||||||||||||||||||
|
Encuadre de línea |
Especifica el tipo de encuadre de línea a realizar a partir de los bordes detectados.
|
||||||||||||||||||||||||||||||||||||||||
|
InspeccionarParDeBordes |
Especifica si la función debe detectar o no pares de bordes. Los pares de bordes se etiquetarán gráficamente en la imagen, indicándose el primer borde detectado como borde 0 y el segundo como borde 1.
|
||||||||||||||||||||||||||||||||||||||||
|
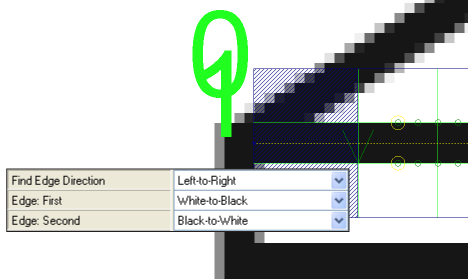
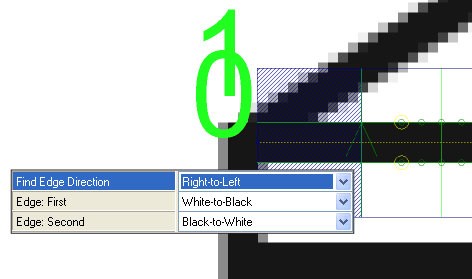
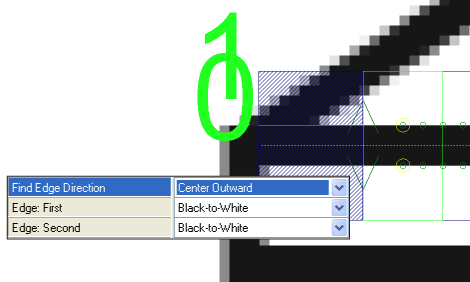
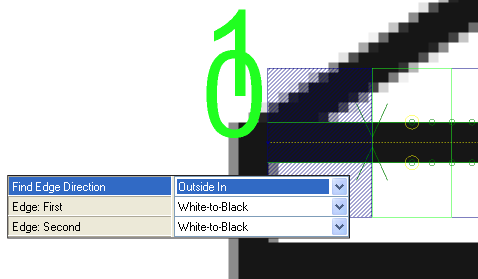
BuscarDirecciónBorde |
Especifica la dirección y el sentido en los que la función hará la exploración para detectar bordes. Se visualizan adicionalmente unas flechas de color verde oscuro para ilustrar gráficamente el sentido y dirección y en los que se detectará el borde. Las líneas de ajuste se etiquetarán gráficamente dentro de la imagen, señalándose la primera línea de ajuste mediante la etiqueta 0 y la segunda línea de ajuste con la etiqueta 1. Nota: Si se comba la región de interés (RDI) de la función InspectEdge referenciada, la inspección se hará en relación con el centro de la curva creada. Si el parámetro BuscarDirecciónBorde se establece en Izquierda a derecha, la inspección se realiza hacia el centro de la curva y si se establece en Derecha a izquierda, la inspección se hace alejándose del centro de la curva.
|
||||||||||||||||||||||||||||||||||||||||
|
Borde: Primero |
Especifica la transición de contraste del primer borde a detectar, tal como lo determina el parámetro Buscar dirección del borde.
|
||||||||||||||||||||||||||||||||||||||||
|
Borde: Segundo |
Especifica la transición de contraste del segundo borde a detectar, tal como lo determina el parámetro Buscar dirección del borde. Nota: El parámetro InspeccionarParDeBordes debe estar activado para que se habilite esta selección.
|
||||||||||||||||||||||||||||||||||||||||
|
Puntuación del borde |
Especifica el modo de puntuación de bordes que se utilizará para determinar si un borde cumple o no los criterios establecidos.
|
||||||||||||||||||||||||||||||||||||||||
|
Encuadre de línea avanzado |
Define cómo debe realizar la función el encuadre de línea.
|
||||||||||||||||||||||||||||||||||||||||
|
Núm. máx. de defectos/huecos |
Especifica el número máximo de defectos y/o huecos que la función debe esperar detectar (1 a 4096; por defecto = 5). Este valor se aplica por separado tanto a defectos como a huecos; por ejemplo, si suponemos que el valor ajustado es 5, la función esperará encontrar como máximo 5 defectos y 5 huecos. Este ajuste se utiliza para construir la tabla de resultados de Acceso a Datos de Visión que presentará la hoja de cálculo. |
||||||||||||||||||||||||||||||||||||||||
|
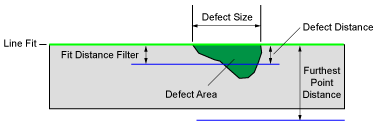
Defectos |
Especifica los parámetros para determinar los defectos en el borde utilizando el encuadre de línea.
|
||||||||||||||||||||||||||||||||||||||||
|
Huecos |
Especifica los parámetros para determinar huecos en el borde.
|
||||||||||||||||||||||||||||||||||||||||
|
Índice de calibre |
Especifica el calibre que se visualizará en la imagen (con trazos verdes); el calibre que se visualiza por defecto es 0. |
||||||||||||||||||||||||||||||||||||||||
|
Mostrar |
Especifica el modo de visualización de las superposiciones gráficas de la función sobre la imagen.
|
InspectEdgeForDefect Salidas
|
Devuelve |
Una estructura de datos Inspección que contiene los defectos, extremos y huecos detectados o #ERR si alguno de los parámetros de entrada no es válido. |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
Resultados |
Cuando se inserta inicialmente la función InspectEdgeForDefect en una celda, se crea una tabla de resultados en la hoja de cálculo que corresponde al tipo de búsqueda que se está realizando. Nota: Si el valor del parámetro Núm. máx. de defectos/huecos es mayor que cero, la función InspectEdgeForDefect insertará automáticamente una tabla de resultados con un máximo de 10 entradas correspondientes a los 10 primeros defectos/huecos/bordes/pares de borde presentados en la estructura de datos. Si desea visualizar más entradas, puede ampliar la tabla copiando la última fila y pegando en filas adicionales al final de la tabla.
Las siguientes funciones de InspectEdge Funciones de Vision Data Access se insertan automáticamente en la hoja de cálculo para crear la tabla de resultados basada en la estructura de datos de InspectEdgeForDefect y que se subdivide en las cuatro secciones tituladas Resumen, Defectos, Huecos y Extremos:
En todas las fórmulas para InspectEdgeForDefect se considera lo siguiente: Nota:
Si el parámetro Inspect Edge Pairs (inspeccionar pares de bordes) está habilitado, se insertarán automáticamente filas adicionales de datos para el borde 1 en la hoja de cálculo. Cuando está habilitado, el índice 0 indica que se devolverá información sobre el borde 0, mientras que el índice 1 indica que se devolverá información sobre el borde 1. |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||