Scanning a Calibration Target
At certain points in the application, you must present the calibration target to the 3D sensors for scanning. There are two types of scans:
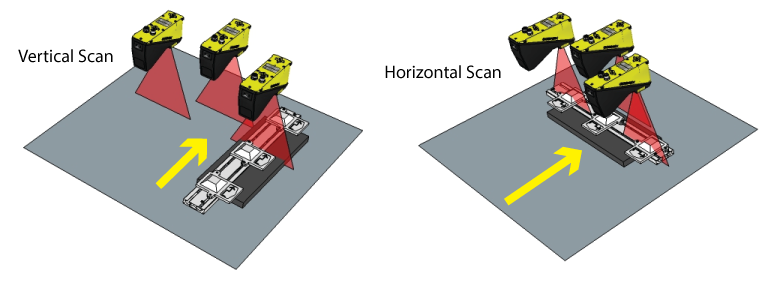
- In a vertical scan, the 3D sensor must detect at least as many frustums as you have 3D sensors.
- In a horizontal scan, each 3D sensor must detect at least one frustum, and the ID (or IDs) of those frustums must have been detected by at least one vertical scan.
The following figure illustrates both types of scans for a configuration of 3D sensors:
In addition, be aware that any sensor will fail to successfully detect a frustum unless it can detect the areas highlighted in the following graphic:
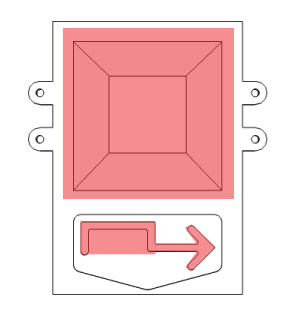
Place the calibration target on your motion system with regard to this minimum viewing requirement.