Configurar la pose del sistema de visión
Debe configurar las opciones de pose de su sistema de visión para que el programa del robot contenga la ubicación correcta del sistema de visión.
-
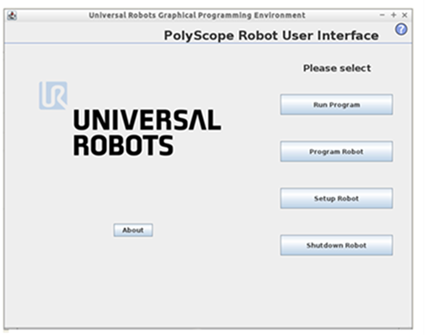
Inicie el programa PolyScope que ha creado. El menú principal mostrará:
-
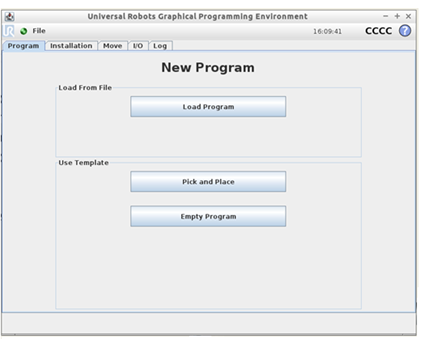
En el menú principal de PolyScope, seleccione Programar robot. Aparecerá una lista de fichas.
-
Seleccione Programa vacío.
-
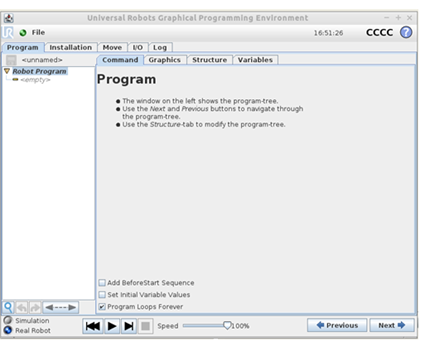
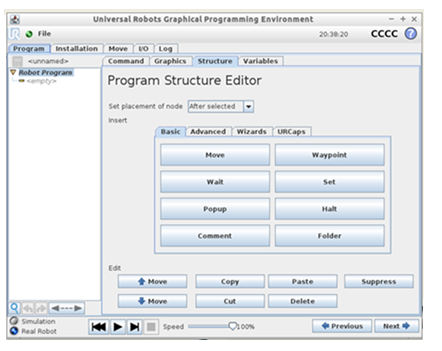
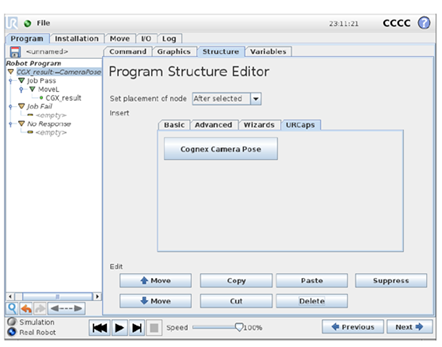
Seleccione la ficha Estructura. Aparecerá la página Editor de estructura de programa.
-
Seleccione URCaps. Se mostrará el botón Cognex Camera Pose (Pose de cámara Cognex), que representa el complemento Cognex In-Sight 2D Robot Guidance.
-
Seleccione el botón Cognex Camera Pose y, luego, la ficha Command (Comando). El árbol del programa del robot en la fila izquierda incluirá ahora el nodo CGX_result;=CameraPose y otros tres nodos más: Job Pass (tarea aprobada). Job Fail (tarea rechazada) y No Response (sin respuesta).
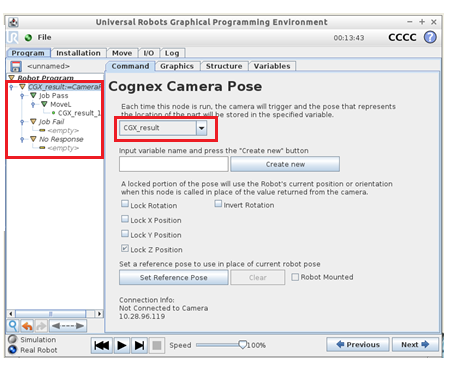
- Se creará un archivo llamado CGX_result que se usará para almacenar la pose del sistema de visión. La pose corresponde a la ubicación de la pieza que se encuentra en el sistema de visión.
- Bloquee las posiciones que no quiera que obtenga el sistema de visión. Si deja todas las rotaciones sin bloquear, la rotación del robot será relativa respecto a la rotación actual en la pinza del robot, que es la rotación establecida cuando el programa alcanza el nodo CGX_result;=CameraPose. Para bloquear una posición, marque la casilla correspondiente.
- Guarde el programa.