Establecer una pose de referencia para el robot
Puede establecer una pose de referencia para que la pinza del robot quede alineada con la pieza entrenada.
-
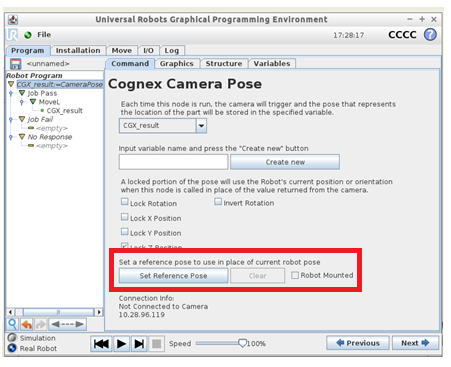
En el árbol del programa del robot de PolyScope, seleccione el nodo CGX_result:=CameraPose. Aparecerá la ventana Cognex Camera Pose (Pose de cámara Cognex).
-
Seleccione Set Reference Pose (Establecer pose de referencia). Aparecerá la herramienta Move (Mover).
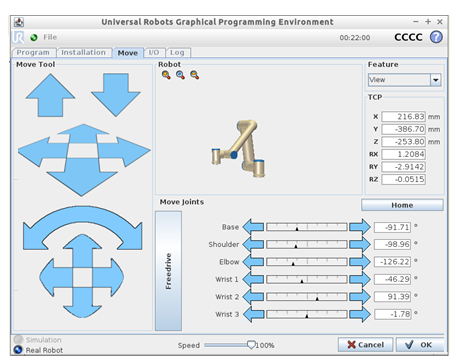
- Úsela esta herramienta para mover la pinza de modo que quede alineada con la pieza entrenada.
- Al acabar, seleccione OK (Aceptar).
-
Si el sistema de visión está montado en el brazo del robot, marque la casilla Robot Mounted (Montado en robot).
Si el sistema de visión no está montado en el brazo del robot, deje esta casilla sin marcar.
- Para guardar la pose de referencia, guarde su programa.