TrainPatMaxRedLine
Extrae y entrena un patrón de una imagen para utilizarlo posteriormente con la función FindPatMaxRedLine.
TrainPatMaxRedLine Entradas
| Parámetro | Descripción | ||||||||||||
|
Imagen |
This parameter must reference a spreadsheet cell that contains an Imagen data structure; by default, this parameter references A0, the cell containing the data structure. This parameter can also reference other Image data structures, such as those returned by the Image Vision Data Access functions or Funciones de transformación de coordenadas. |
||||||||||||
|
Elemento posicionador |
Define la región de interés (RDI) con relación a un Fixture entrado o al sistema de coordenadas de imagen proporcionado por una función de Vision Tools. Establecer la RDI con relación al un elemento posicionador permite asegurar que si se gira o desplaza el elemento posicionador, se girará o desplazará en consonancia la RDI, manteniéndose fija la relación entre ambos. El valor de configuración predeterminado es (0,0,0), la esquina superior izquierda de la imagen.
|
||||||||||||
|
Región del patrón |
También conocida como región de interés (RDI), especifica la región de la imagen que se somete a análisis. Haga doble clic sobre el parámetro Región para crear un Modo gráfico interactivo que permite transformar y girar. Seleccione este parámetro y pulse el botón «Maximizar región» en la barra de herramientas de edición de tareas de la hoja de propiedades a fin de expandir automáticamente la región hasta cubrir toda la imagen.
Nota: Los parámetros Elemento posicionador y Región deben estar definidos dentro de los límites de la imagen; de lo contrario, la función dará #ERR.
|
||||||||||||
|
Región externa |
Este parámetro utiliza Referencias de celda a la celda de hoja de cálculo que contiene una función Annulus, Circle, Region, EditAnnulus, EditCircle, EditCompositeRegion o EditPolygon o o una función EditRegion. Cuando se utiliza este parámetro, la función ignora los valores de ajuste de Región y Elemento posicionador e inspecciona el área de imagen especificada por la región a la que se hace referencia. Si se hace referencia a un control de EditCompositeRegion, el área de inspección puede consistir en una combinación de formas. Cada forma de la región combinada puede definirse como una forma añadida al área de inspección o una sustraída (enmascaramiento) de la misma. Nota: Si este parámetro ha sido configurado como referencia a una región externa, entonces, para utilizar la Región interna de la función, habrá que poner manualmente este parámetro a cero introduciendo para ello el valor 0 en lugar de la referencia de celda. En caso contrario, la función seguirá haciendo referencia a la región externa.
|
||||||||||||
|
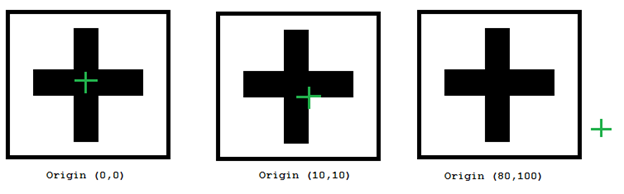
Origen del patrón |
Especifica las coordenadas X e Y del origen del patrón de entrenamiento, como dos componentes de desplazamiento con respeto al centro de la región de entrenamiento.
|
||||||||||||
|
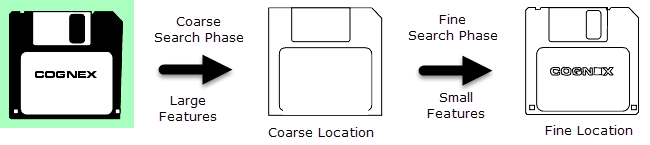
Autoselección gruesa |
Cuando está habilitada, selecciona automáticamente el tamaño de la granularidad del patrón a utilizar durante la fase de búsqueda aproximada. La granularidad gruesa se utiliza para encontrar características grandes con el fin de encontrar rápidamente una coincidencia aproximada de patrón en una imagen durante el tiempo de ejecución.
|
||||||||||||
| Autoselección fina |
Cuando está habilitada, selecciona automáticamente la granularidad del patrón a utilizar durante la fase de búsqueda precisa. La granularidad fina se utiliza para encontrar pequeñas características a fin de determinar con precisión la ubicación del patrón.
|
||||||||||||
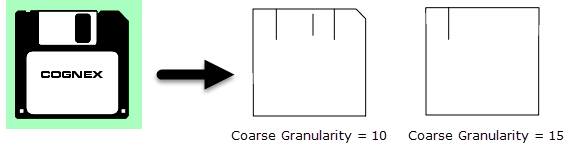
| Granularidad gruesa |
Especifica la granularidad gruesa, como valor de píxel. La granularidad gruesa se utiliza para encontrar características grandes con el fin de encontrar rápidamente una coincidencia aproximada de patrón en una imagen durante el tiempo de ejecución (1 a 30; 4 = por defecto). Nota: El parámetro «Autoselección gruesa» está habilitado por defecto; debe deshabilitarlo para habilitar el presente parámetro.
|
||||||||||||
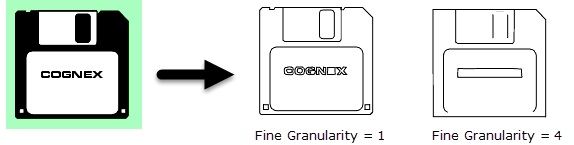
| Granularidad fina |
Especifica la granularidad fina, como valor de píxel. La granularidad fina se utiliza para encontrar pequeñas características a fin de determinar con precisión la ubicación del patrón (1 a 10; 1 = por defecto). Nota:
|
||||||||||||
| Umbral de la característica |
Especifica el contraste mínimo de las características entrenadas; para entrenar características adicionales de bajo contraste, reduzca este valor. Para ignorarlas, auméntelo (1 a 100; 20 = por defecto). |
||||||||||||
| Evento de entrenamiento |
Especifica Referencias de celda a una celda que contiene un desencadenante del evento de entrenamiento de un modelo. Nota: El entrenamiento se produce cuando la hoja de propiedades está abierta o cuando un desencadenante del evento, como un botón u otra celda habilitada condicionalmente, es distinto de cero.
|
||||||||||||
| Reutilizar imagen de entrenamiento |
Especifica si la imagen utilizada para entrenar el patrón ha de guardarse o no cuando se modifican los parámetros de ajuste de Pattern («Origen del patrón», «Autoselección gruesa», «Autoselección fina», «Granularidad gruesa», «Granularidad fina» o «Umbral de ruido»).
|
||||||||||||
|
Tiempo de espera |
Especifica la duración del periodo de tiempo, en milisegundos (0 a 30000; 0 = por defecto), durante el cual la función busca un patrón válido y tras el cual se detiene la ejecución de la función y emite un #ERR. Cuando se establece en 0, este parámetro está deshabilitado y no se considera ningún tiempo de espera. |
||||||||||||
|
Mostrar |
Especifica el modo de visualización de los gráficos de TrainPatMaxRedLine sobre la imagen.
|
TrainPatMaxRedLine Salidas
|
Devuelve |
Una estructura de datos Patterns que contiene el patrón entrenado, o #ERR si alguno de los parámetros de entrada no es válido.
|
||||||
|
Resultados |
Cuando se inserta inicialmente la TrainPatMaxRedLine en una celda, se visualiza automáticamente el estado de entrenamiento en la celda adyacente de la derecha. Si no se puede entrenar un patrón, se insertará #ERR.
Se inserta automáticamente en la hoja de cálculo una función de Patterns Vision Data Access functions:
|