Edge
En la terminología de la visión artificial, un borde se define como el límite (ya sea este una línea, un arco o un círculo) entre dos grupos de píxeles adyacentes cuyos valores en escala de grises son bien contrastados. Las herramientas Edge de In-Sight se utilizan para detectar bordes y hacer evaluaciones estadísticas sobre los bordes encontrados.
¿Qué es la detección de bordes?
La detección de bordes por las funciones de herramienta Edge de In-Sight se realiza mediante la exploración de una región de interés (RDI) en búsqueda de discontinuidades en la polaridad de los píxeles, es decir, zonas de la imagen en las que se produce un cambio brusco de píxeles claros a oscuros (o viceversa). Un borde puede abarcar solo dos o tres píxeles o varios pixeles.
Ejemplo con Edge
Los bordes pueden estar formados por una sola línea de separación o por un par de bordes que comprende dos transiciones de oscuro a claro o de claro a oscuro. La siguiente figura ilustra estos tipos de bordes:
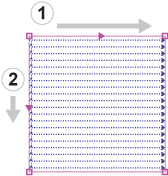
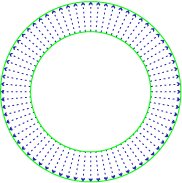
Cuando se inserta una herramienta Edge, como la función Caliper, FindLine o FindCircle, en la hoja de cálculo, el dispositivo explora la RDI en busca de discontinuidades en los valores de los píxeles. La siguiente figura ilustra la dirección en la que se exploran las regiones rectangulares o anulares en busca de las características de un borde. En una región rectangular, la exploración se realiza en la dirección horizontal (indicada mediante dos flechas direccionales) y empieza en la esquina superior izquierda hasta llegar al final del lado derecho y, a continuación, se reanuda sucesivamente esta pauta hasta llegar a la esquina inferior derecha.
Direcciones de exploración - Regiones rectangulares y anulares
Durante este proceso, se calcula un histograma en escala de grises de la RDI y las zonas que presentan un alto contraste (transiciones con gran diferencia entre valores en escala de grises) y cumplen los demás parámetros especificados se definen como borde o bordes.
El gráfico de respuesta de bordes (que se visualiza cuando el parámetro Mostrar está configurado para mostrar todo: entrada, resultado y gráfico) representa la primera derivada de los valores en escala de grises encontrados en la RDI, en la que los picos y valles indican las principales transiciones correspondientes a bordes, como se ilustra en la figura siguiente. El parámetro Umbral de aceptación/Contraste mínimo se utiliza para establecer una altura de pico mínima (umbral de contraste). Con este ajuste, se excluyen del resultado los picos cuya altura es inferior a la altura de pico mínima especificada. Esto permite restringir el análisis de inspección de bordes a los que presentan una determinada magnitud. El gráfico de respuesta de la función borde puede utilizarse por tanto para determinar el umbral de contraste apropiado.
Ejemplo de gráfico de respuesta de bordes
- El eje de puntuación (Score) está definido por los parámetros Puntuación (100 y -100) y Umbral de aceptación que se han ajustado para la herramienta. Los picos (o puntuaciones positivas) indican bordes relacionados con una transición de oscuro a claro, mientras que los valles (o puntuaciones negativas) indican bordes relacionados con una transición de claro a oscuro (una puntuación igual a 0 indica que no se ha detectado allí ningún borde).
- El eje de desplazamiento (offset) se refiere a la RDI en la que se ha detectado la característica de borde, donde 0 representa el inicio de la región y el valor máximo a la derecha, la anchura máxima (en píxeles) de la región. La posición del vértice de los picos o valles registrados en la dirección del eje de desplazamiento indica la posición del borde encontrado dentro de la RDI.
Ancho de borde - Filtrado de bordes
El parámetro Ancho de borde se utiliza para eliminar ruido de la imagen de entrada y acentuar los picos correspondientes a los perfiles de borde. El valor del parámetro Ancho de borde debe ajustarse de manera que corresponda lo mejor posible al tamaño de los bordes en la imagen y que los picos se vean nítidos y pronunciados, en lugar de aplanados y graduales. Este valor del tamaño del borde representa el número de píxeles que hay en el ancho del borde; un borde puede ser nítido, en cuyo caso su ancho solo abarca un píxel o dos, o poco diferenciado, en cuyo caso su ancho puede abarcar varios píxeles. Al ajustar el parámetro Ancho de borde con un valor cercano al tamaño efectivo del borde, se consigue que la función dé picos de borde más marcados en la imagen. Por lo contrario, si se especifica valor para Ancho de borde que es demasiado grande o demasiado pequeño, se obtendrán picos anchos y bajos en la imagen.
Resultados de la herramienta Edge
Una vez definido el borde, la función Edge creará automáticamente una estructura de datos Edges y una tabla de resultados que contiene los datos sobre el borde definido. La información proporcionada por la función puede ser utilizada como entrada de un elemento posicionador para otras herramientas del conjunto Vision Tools de In-Sight u otras funciones Edge que se utilicen para extrapolar los datos o profundizar más en la exploración de bordes.
¿Cuándo se utilizan las herramientas Edge?
Las herramientas para bordes (Edge) deben utilizarse en las siguientes circunstancias:
- El borde presenta un alto contraste entre píxeles claros y oscuros.
- La aplicación requiere una detección rápida de las características. Las herramientas Edge son unas de las herramientas más rápidas del conjunto Vision Tools de In-Sight, pudiendo estas detectar características de bordes más rápidamente que las herramientas para patrones, por ejemplo.
¿Por qué se utilizan herramientas Edge?
La detección de bordes y la extrapolación de datos pueden ser extremadamente útiles en aplicaciones como las siguientes:
- Aplicaciones de calibración, por ejemplo, la medición del radio de características circulares en piezas como juntas o la medición de la longitud de circuitos en una placa de circuitos.
- Localizar características en piezas, como características circulares o extremos rectos en piezas, y utilizar el resultado como entrada de un elemento posicionador para otras herramientas de Vision Tools de In-Sight.
- Aplicaciones de presencia/ausencia en las que las herramientas Edge se utilizan para determinar si una característica de borde está o no en una pieza.
- Aplicaciones de recuento y clasificación en las que las herramientas Edge se utilizan para contar y clasificar bordes en función de unos determinados parámetros.
¿Cómo se utilizan las herramientas Edge?
Las herramientas Edge se utilizan normalmente de la siguiente manera:
- Paso 1 - Se examina la imagen y se considera si una herramienta Edge cumple los requisitos de la aplicación.
- Paso 2 - Se inserta una de las herramientas de Edge, como Caliper, FindCircle, FindCircleMinMax, FindCurve, FindLine, FindMultiLine o FindSegment, en la hoja de cálculo y, a continuación, se configuran los parámetros para definir el borde o par de bordes y poder detectarlos en la imagen.
- Paso 3 - Para filtrar, evaluar, clasificar u ordenar los bordes o pares de bordes encontrados, se inserta otra herramienta Edge, como PairDistance, PairEdges, PairMaxDistance, PairMeanDistance, PairMinDistance, PairSDevDistance, PairsToEdges o SortEdges, según los criterios específicos.