Caliper
Se utiliza para realizar las siguientes inspecciones relacionadas con bordes: medir la anchura de objetos, determinar la ubicación de bordes individuales, así como la ubicación de pares de bordes y la separación entre los dos bordes del par. La función Caliper es la función más precisa del conjunto de funciones Edge para bordes, sin embargo, hay que dedicarle más tiempo para configurarla y prepararla para el uso requerido.
Caliper Descripción general
La función Caliper se utiliza para examinar una imagen y localizar un borde unidimensional, un cambio en los valores de escala de grises entre píxeles vecinos. La función examina una parte determinada de la imagen (especificada por el parámetro Región) y busca una transición en los valores de gris de los píxeles a lo largo de una dirección, pudiendo ser la transición de oscuro a claro o de claro a oscuro. La función puede localizar un borde individual o un par de bordes (separados por una determinada distancia esperada).
La función Caliper es ideal para aplicaciones en las que se utiliza la función para elaborar información detallada sobre las ubicaciones precisas de características en los bordes internos o de contorno de un objeto. Por ejemplo, la función podría utilizarse para contar los conectores de un chip, medir la anchura de una pieza o encontrar puntos de un borde que se utilizarían como entrada para otra herramienta del conjunto Vision Tools. La función localiza bordes o pares de bordes utilizando un modelo de bordes en el que se detectan posibles picos candidatos a bordes mediante un kérnel unidimensional y se puntúan seguidamente los picos según un modelo y métodos de puntuación.
Una vez determinadas la ubicación y orientación de los bordes de interés en la imagen, se puede proceder a aplicar la función Caliper:
- Hay que configurar la Region que delimita la zona en la que se encuentran los bordes o pares de bordes.
- Hay que ajustar el parámetro «Modo de bordes» para establecer con él el tipo de bordes (borde individual o par de bordes) a inspeccionar y hay que especificar el número de bordes a encontrar y, además, configurar Borde: Borde, primero: Y Borde, segundo: Parámetros de distancia para crear un modelo de borde que incluye la polaridad de los bordes, la posición de los mismos y la separación entre bordes.
- Ajustar los parámetros «Ancho de borde» y «Contraste mínimo» para identificar los bordes o pares de bordes.
- Definir el método de puntuación que se utilizará para puntuar a los candidatos a borde.
Configuración de Región
Cuando defina la posición de la región, asegúrese de que la dirección de exploración está adecuadamente ajustada para que se puedan identificar correctamente los bordes deseados. La dirección de la exploración debe apuntar hacia el primer borde a detectar. La posición de los bordes se determinará por el lugar en el que se detecten los bordes con respecto al centro de la región.
Identificación de bordes y definición del modelo de bordes
Una vez localizados los bordes en la región, la función Caliper calcula la puntuación para los distintos bordes potenciales en la imagen. La puntuación de cada borde se calcula en función del grado de similitud entre el borde de la imagen actual y el borde ideal previamente definido. Los bordes en la imagen actual se consideran "candidatos a borde", mientras que el borde ideal es el denominado "modelo de borde" (que puede ser un borde individual o un par de bordes).
Modelo de borde
Para evaluar si un candidato a borde en la imagen se corresponde bien al borde buscado, es necesario haber definido previamente un modelo que describa con precisión el borde de interés. Un modelo de borde se define especificando en primer lugar el tipo de borde, es decir, si se trata de un borde individual o un par de bordes. En segundo lugar, hay que definir el número de bordes de este tipo a localizar en la región. A continuación, se especifica la polaridad (blanco a negro o negro a blanco), la posición de cada borde en el modelo, especificada como posición con respecto al centro de la región, y la separación entre bordes si se están definiendo pares de bordes.
Detección de bordes, detección de picos en condiciones de umbral de contraste (mínimo)
El parámetro «Ancho de borde» se utiliza para eliminar ruido de la imagen entrada y acentuar los picos de perfiles de borde. Utilice el parámetro «Contraste mínimo» para establecer la altura de pico mínima (umbral de contraste).
Puntuación en el modo de bordes
Una vez que la función Caliper ha filtrado la región y ha generado una lista de picos de borde que superan el umbral de contraste especificado, la función pasa a calcular la puntuación para cada candidato a borde en la imagen. A partir de esta puntuación se seleccionan los bordes candidatos en la imagen que son en efecto bordes de interés según lo definido por el modelo de borde.
La función Caliper calcula la puntuación de cada candidato a borde a partir de una comparación del candidato a borde con el modelo de borde y aplicando el conjunto de criterios de puntuación definidos por el usuario, denominados métodos de puntuación.
Un método de puntuación comprende dos partes:
- Un tipo de método de puntuación que define la medida del borde que ha de evaluarse
- Una función de puntuación que define la relación entre la medida bruta y la puntuación asignada que se genera para el método de puntuación
Se pueden definir varios métodos de puntuación. La función Caliper aplica todos los métodos de puntuación definidos a cada candidato a borde encontrado en la imagen y devuelve una puntuación global para cada candidato a borde. Conviene definir apropiadamente los métodos de puntuación para garantizar que el borde candidato que recibe la puntuación más alta es efectivamente el borde de interés.
Tipos de método de puntuación
La función Caliper basa la puntuación de un candidato a borde en el grado de discrepancia entre el candidato a borde y el modelo de borde. La medida concreta que utilizará la herramienta para evaluar las discrepancias la define el usuario. Los tipos de medidas que el usuario puede establecer se denominan tipos de método de puntuación y, en concreto, dispone de cuatro tipos de métodos de puntuación: Contraste, Posición, Tamaño y Straddle.
Cuando la función aplica un tipo determinado de método de puntuación a un candidato a borde, el resultado que proporciona es lo que se denomina puntuación bruta. La puntuación bruta varía en función del tipo de método de puntuación. Los tipos de método de puntuación y las puntuaciones brutas correspondientes se describen más detalladamente en las siguientes secciones.
Métodos de puntuación de contraste
Cada candidato a borde recibe una puntuación en función del contraste que presenta cada uno de ellos. El contraste de un borde se expresa como diferencia en los valores de píxeles dividido por el tamaño del borde expresado en píxeles. La puntuación bruta obtenida con el método de puntuación de contraste es un valor normalizado de manera que un valor de 100 equivale a un contraste de 256 (el valor máximo que puede tener el contraste). Si se especifica un modelo de par de bordes, la puntuación bruta es el valor medio del contraste en los dos bordes.
Métodos de puntuación posicional
Cada candidato a borde recibe una puntuación en función de su posición con respecto al centro de la región. La posición se define como la distancia entre el centro y el punto de origen del modelo en el candidato a borde. Si cabe esperar que el borde de interés está a una determinada distancia del centro de la región, entonces se puede definir un método de puntuación de posición absoluta y la puntuación bruta se expresará como una distancia absoluta en píxeles. Si se utiliza un modelo de par de bordes y se tiene que considerar la variación de posición entre el candidato a borde y el centro de la región en relación con el tamaño del modelo, entonces defina un método de puntuación de posición relativa. En este caso, la puntuación bruta se normaliza de modo que un valor de 100 significa que la distancia es igual al tamaño del modelo.
Métodos de puntuación por tamaño
Si se utiliza un modelo de par de bordes, los candidatos a borde reciben una puntuación en función de la diferencia entre la anchura del par de bordes (separación entre el par de bordes) del candidato con respecto a la anchura (separación entre el par de bordes) del modelo de bordes. El método de puntuación por tamaño puede definirse también como absoluto, en cuyo caso la puntuación bruta devuelta es la diferencia de tamaños absoluta expresada en píxeles. Si requiere una calificación de la diferencia de tamaño en relación con el tamaño del modelo, entonces defina un método de puntuación por tamaño relativo. En este caso, la puntuación bruta se normaliza de manera que un valor de 100 significa que la diferencia de tamaño es igual al tamaño del modelo.
Métodos de puntuación Straddle
Si se utiliza un modelo de par de bordes, los candidatos a pares de bordes reciben una puntuación en función de si los dos bordes se encuentran o no a ambos lados del centro de la región. Este tipo de método de puntuación puede utilizarse para encontrar objetos definidos por un par de bordes que se esperan situados por debajo del centro de la región. La puntuación bruta que se devuelve es de 100 si los bordes están a ambos lados del centro de la región y es 0 si no lo están.
Funciones de puntuación
Para cada método de puntuación, el tipo de método de puntuación seleccionado proporciona la puntuación bruta correspondiente; por otra parte, se puede controlar el efecto que tiene una puntuación bruta sobre la puntuación global por medio de la definición de una función de puntuación. Una función de puntuación asigna una puntuación bruta a una puntuación asignada. Las puntuaciones asignadas para cada método de puntuación de un candidato a borde se combinan para obtener la puntuación global para dicho candidato a borde.
Caliper Ficha General
| Parámetro | Descripción | ||||||||||||
|
Imagen |
This parameter must reference a spreadsheet cell that contains an Imagen data structure; by default, this parameter references A0, the cell containing the data structure. This parameter can also reference other Image data structures, such as those returned by the Image Vision Data Access functions or Funciones de transformación de coordenadas. |
||||||||||||
|
Elemento posicionador |
Define la región de interés (RDI) con relación a un Fixture entrado o al sistema de coordenadas de imagen proporcionado por una función de Vision Tools. Establecer la RDI con relación al un elemento posicionador permite asegurar que si se gira o desplaza el elemento posicionador, se girará o desplazará en consonancia la RDI, manteniéndose fija la relación entre ambos. El valor de configuración predeterminado es (0,0,0), la esquina superior izquierda de la imagen.
|
||||||||||||
|
Región |
También conocida como región de interés (RDI), especifica la región de la imagen que se somete a análisis. Haga doble clic sobre el parámetro Región para crear un Modo gráfico interactivo que permite transformar y girar. Seleccione este parámetro y pulse el botón «Maximizar región» en la barra de herramientas de edición de tareas de la hoja de propiedades a fin de expandir automáticamente la región hasta cubrir toda la imagen.
|
||||||||||||
|
Nota: Los parámetros Elemento posicionador y Región deben estar definidos dentro de los límites de la imagen; de lo contrario, la función dará #ERR.
|
|||||||||||||
|
Modo de bordes |
Especifica si la función debe localizar un borde individual o un par de bordes.
|
||||||||||||
|
Número a buscar |
Especifica el número máximo de bordes o pares de bordes a devolver (1 en el ancho de la imagen de la cámara In-Sight menos 1; por defecto = 1). El número máximo de bordes que se pueden detectar es en una unidad menor que la anchura de la imagen que proporciona la cámara In-Sight que captura la imagen (es decir, el máximo de una cámara ISC 8402 sería 1599 o la resolución de imagen de 1600 x 1200 del sistema de visión menos 1). Si hubiera más bordes o pares de bordes cuyas puntuaciones superan el umbral: Aceptar el valor del parámetro, se seleccionarán los bordes o pares de bordes con las puntuaciones más altas. |
||||||||||||
|
Contraste mínimo |
Especifica el contraste mínimo (0 a 100; por defecto = 5) para bordes o pares de bordes; el valor del contraste se normaliza de manera que el histograma de escala de grises dentro de la Región pasa a tener una escala de 0 a 100. La función devolverá únicamente los bordes o pares de bordes que presentan valores de contraste superiores al valor aquí especificado. |
||||||||||||
|
Umbral: Aceptar |
Especifica la puntuación de coincidencia mínima requerida (de 0 a 100; por defecto = 5) para que se acepte un candidato a borde; la función devolverá únicamente los bordes o pares de borde que tengan puntuaciones de coincidencia superiores al valor aquí especificado. La puntuación de coincidencia es la media geométrica de las puntuaciones obtenidas con todos los métodos de puntuación especificados. |
||||||||||||
|
Ancho de borde |
Especifica la distancia en píxeles (de 1 a 50; por defecto = 2) en la que se produce una transición de borde. El parámetro Ancho de borde se utiliza para filtrar la imagen antes de extraer los bordes. |
||||||||||||
|
Borde: Primero |
Especifica la polaridad del primer borde de un par de bordes, en relación con la dirección de exploración en la Región; cuando se establece como negro a blanco o blanco a negro, la función devolverá únicamente los pares de bordes cuyo primer borde tiene la polaridad aquí especificada.
|
||||||||||||
|
Borde: Segundo |
Especifica la polaridad del segundo borde de un par de bordes, en relación con la dirección de exploración en la Región; cuando se establece como negro a blanco o blanco a negro, la función devolverá únicamente los pares de bordes cuyo segundo borde tiene la polaridad aquí especificada. Nota: Este parámetro se utiliza únicamente cuando el parámetro «Modo de borde» está ajustado a Par de borde.
|
||||||||||||
|
Borde: Distancia |
Especifica la distancia en píxeles (de 1 a 3 veces la anchura del sistema de In-Sight Vision; por defecto = 10) entre los dos bordes de un par de bordes. Este parámetro sólo se utiliza con el modo «Par de bordes». Si la distancia entre bordes es mayor que el ancho de la región, la función devolverá #ERR. Si la región no está girada o curvada, este valor debe ser menor que o igual al ancho de la región. Nota: La anchura de imagen de un sistema de visión In-Sight es la anchura de la imagen del sistema concreto In-Sight que realiza la captura de imagen (es decir, el máximo de un sistema de visión In-Sight 5100 sería 1920 que es 3 veces la anchura de la resolución de la imagen 640 x 480 del sistema de visión).
La dimensión de las herramientas 2D era de 640x480. Pero ha pasado a ser de 1430x1006 para 3D - A1000 y de 2880x8000 para 3D - L4000. De esta forma, el número máximo de líneas que capturan actualmente los sistemas de visión de la serie A1000 es de 1430, mientras que el número máximo de líneas que capturan los sistemas de visión de la serie L4000 es de 2880. La anchura máxima de los dispositivos A1000 In-Sight es de 1006, mientras que la de los dispositivos L4000 In-Sight es de 8000. |
||||||||||||
|
Mostrar |
Especifica cómo han de visualizarse las superposiciones gráficas de Caliper sobre la imagen.
|
||||||||||||
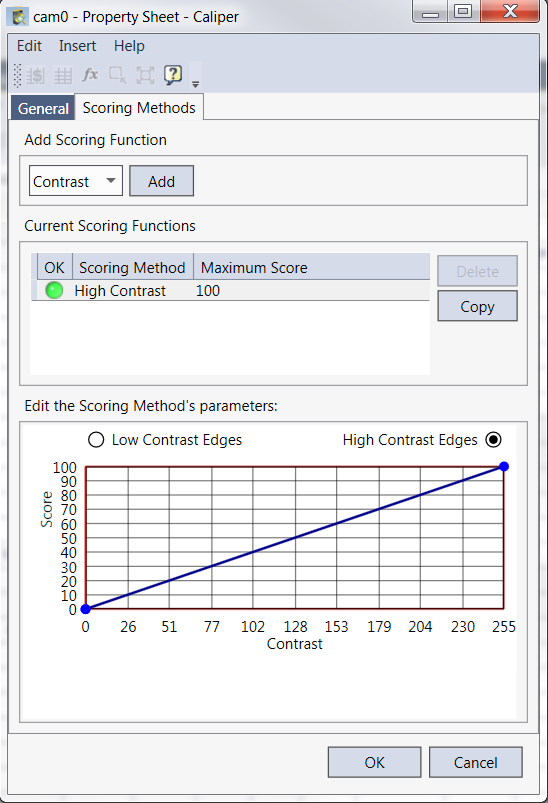
Caliper Pestaña de «Métodos de puntuación»
La pestaña «Métodos de puntuación» se utiliza para seleccionar y editar las funciones de puntuación que deben utilizarse para puntuar a los candidatos a borde por comparación con el modelo de bordes. Para cada candidato a borde, una vez que la función Caliper ha calculado la puntuación bruta según los distintos métodos de puntuación seleccionados y aplicado la función de puntuación, se determina la puntuación global del candidato a borde en cuestión. La puntuación global se calcula tomando la enésima raíz del producto de las distintas puntuaciones asignadas. Por ejemplo, si se han definido cuatro métodos de puntuación, la función Caliper multiplicará las cuatro puntuaciones correspondientes y tomará la cuarta raíz del producto (si hubiese alguna de las funciones de puntuación que diera el valor 0, entonces la puntuación global del candidato a borde sería también 0).
La pestaña Caliper «Métodos de puntuación» está subdividida en tres áreas:
- Agregar función de puntuación
- Funciones de puntuación actuales
- Editar los parámetros del método de puntuación
Funciones de puntuación
En la sección Agregar función de puntuación , elija una opción, Posición, Contraste, Tamaño o Straddle, en el menú desplegable. Haga clic sobre el botón Agregar para confirmar.
| Parámetro | Descripción |
|
Posición |
En este método de puntuación, disponible para pares de bordes y bordes individuales, la puntuación se basa en la posición del borde o del par de bordes con respecto al lado izquierdo o centro de la Región. Ajuste la configuración de este método de puntuación para establecer la puntuación a dar a los bordes o pares de bordes en función de su proximidad al lado izquierdo de la Región, siendo la gama de puntuación de 0 a 100. Si la casilla Centro región está habilitada (estado por defecto), los bordes o pares de bordes se puntúan en función de su posición con respecto al centro de la región. Seleccione Bordes externos o Bordes centrados mediante el botón de selección para definir lo que ha de considerarse en el cálculo de la puntuación. Los bordes centrados son los más cercanos al centro de la región, mientras que los bordes externos son los más alejados del centro. Si la casilla Centro región no está habilitada, la puntuación se basará en la posición de los bordes con respecto al lado izquierdo o derecho de la región. Seleccione Bordes laterales izquierdos o Bordes laterales derechos mediante el botón de selección para definir lo que ha de considerarse en el cálculo de la puntuación. Si la casilla Normalizar a distancia del par de bordes está habilitada (sólo se utiliza para pares de bordes), se dividirá la distancia entre los bordes del par por el valor de Borde: el valor del parámetro de distancia antes de calcular la puntuación. Esto permite incluir los cambios de tamaño en la Región por medio de un valor porcentual, en lugar de considerar su valor efectivo en el cálculo de la puntuación. Nota: La opción Normalizar a distancia del par sólo está disponible para pares de bordes.
|
|
Contraste |
En este método de puntuación, disponible para pares de bordes y bordes individuales, la puntuación se basa en el contraste del candidato a borde, es decir, el cambio en contraste detectado al pasar a los píxeles adyacentes que componen el borde. En el caso de pares de borde, se considera el valor medio del contraste detectado en los dos bordes. Ajuste la configuración de este método de puntuación para establecer la puntuación a dar a bordes o pares de bordes en función de su contraste, siendo la gama de puntuación de 0 a 100. La base para el cálculo de la puntuación puede ser, o bien del tipo Bordes de bajo contraste, o bien del tipo Bordes de alto contraste. |
|
Tamaño |
Nota: Sólo disponible para pares de bordes.
Este método de puntuación se basa en la distancia (tamaño) entre pares de aristas. Ajuste la configuración de este método de puntuación para establecer la puntuación a dar a pares de bordes en función de su tamaño, siendo la gama de puntuación de 0 a 100.
Si la casilla Utilizar diferencia de distancia entre bordes de pares está habilitada, el cálculo de la puntuación se realiza utilizando la distancia real y distinguiendo entre distancias más cercanas al borde y más alejadas del borde: Valor del parámetro de distancia en píxeles como base para el cálculo de la puntuación. De lo contrario, la base para el cálculo de la puntuación es la distinción entre distancias de separación entre bordes mayores o menores que el valor de borde esperado: Valor del parámetro de distancia . La casilla Utilizar diferencia simétrica (desactivada por defecto) proporciona una forma de aceptar cambios de escala de la región. Con este ajuste, si hay tamaños menores o mayores que el de Borde: Se puede especificar un valor para el parámetro de distancia. Este ajuste permite aceptar un cambio en una dirección e ignorar un cambio en la otra. Por ejemplo, se podrían aceptar distancias más pequeñas, pero ajustar el método para que se puntúen menos las distancias mayores. |
|
Straddle |
Nota: Sólo disponible para pares de bordes.
Este método de puntuación se basa en si los dos bordes del par se encuentran o no a ambos lados del centro de la región. Este tipo de método de puntuación puede utilizarse para encontrar objetos definidos por un par de bordes que se espera que estén ubicados por debajo del centro de la región de la imagen. Se da la puntuación 0 cuando los bordes del par no están a ambos lados del centro de la región de la imagen y se da la puntuación 100 cuando sí lo están. |
Función de puntuación actual
Esta sección visualiza el estado actual y la configuración de las funciones de puntuación vigentes. Por defecto, se crea al iniciar una función de puntuación de Alto Contraste. Se pueden duplicar las funciones mediante el botón Copiar o borrar mediante el botón Eliminar .
| Etiqueta | Descripción |
| OK |
Indicador luminoso de estado: Rojo = El método de puntuación no es válido para el modo de borde que considera actualmente Caliper. |
| Método de puntuación | Muestra el tipo de función de puntuación y los parámetros adicionales que se han configurado en la sección Editar parámetros del método de puntuación. |
| Puntuación máxima | La puntuación máxima de una función (por defecto 100), se puede ajustar en la sección Editar parámetros del método de puntuación. |
Editar los parámetros del método de puntuación
Esta sección presenta un gráfico interactivo que permite realizar ajustes haciendo clic sobre un punto y moviéndolo hasta la posición deseada. Los ajustes disponibles son los que corresponden al tipo de función de puntuación.

|
Al hacer clic sobre un punto se visualiza un punto de control. Se puede mover este punto con el ratón o mediante los botones de flecha si se requiere un control más preciso. Según cual sea la configuración, algunos puntos pueden tener el reposicionamiento restringido o incluso puede ser que ni se puedan reposicionar. |
Las funciones de puntuación se definen especificando los valores bajos y altos de entrada y salida. Hay dos tipos de funciones de puntuación: funciones unilaterales y funciones bilaterales.
Funciones de puntuación unilaterales
La función de puntuación se configura definiendo valores para xC, x1, x0, y1 e y0. Los valores que se definan para y0 e y1 deben estar comprendidos entre 0 y 100. Los valores que se especifiquen para xC, x1 y x0 pueden ser valores negativos (se especifican valores negativos si se espera que uno o varios de los puntos xC, x1 y x0 den una puntuación bruta inferior a cero), mientras que la gama de valores en la que deben estar comprendidos depende del tipo de método de puntuación que se haya seleccionado. La función de puntuación configurada asigna de la manera siguiente puntuaciones de entrada a puntuaciones de salida:
- Los valores de entrada superiores a x0 se asignan a una puntuación de salida de y0.
- Los valores de entrada inferiores a xC se asignan a una puntuación de salida igual a 0.
- Los valores de entrada entre xc y x1 se asignan a una puntuación de y1.
- Los valores de entrada entre x1 y x0 se asignan linealmente a la gama de puntuaciones entre y1 e y0.
La función de puntuación indicada anteriormente sería apropiada para un caso en el que las puntuaciones más altas de entrada deben producir puntuaciones más altas de salida, como es el caso en un método de puntuación de contraste en el que un mayor contraste en el borde debería dar una puntuación más alta.
Funciones de puntuación bilaterales
Si se utiliza un par de bordes, se puede definir una función de puntuación bilateral que puntúe los candidatos a bordes menores que el modelo de bordes de forma distinta que los candidatos a bordes mayores que el modelo de bordes. La figura anterior ilustra un ejemplo de función de puntuación bilateral que es más tolerante con los candidatos a bordes que son mayores que el modelo de bordes que con los candidatos a bordes que son menores. En este ejemplo, si un candidato a borde tiene exactamente el mismo tamaño que el modelo de borde, la puntuación de entrada será 0.0; si el candidato a borde es menor que el modelo de borde, la puntuación de entrada será menor que 0; si el candidato a borde es mayor que el modelo de borde, la puntuación de entrada será mayor que 0.
Si se especifica una función de puntuación bilateral, la puntuación bruta se normaliza de manera que un candidato a borde que es más pequeño que el modelo de borde en una cantidad igual al tamaño del modelo de borde recibe una puntuación de entrada de -100, mientras que un candidato a borde que es más grande que el modelo de borde en una cantidad igual al tamaño del modelo de borde recibe una puntuación de entrada de 100.
Caliper Salidas
|
Devuelve |
Una estructura de datos Edge que contiene pares de bordes, o #ERR si alguno de los parámetros de entrada no es válido. |
|||||||||||||||||||||||||||
|
Resultados |
Cuando se inserta inicialmente la función Caliper en una celda, se crea una tabla de resultados en la hoja de cálculo. Los siguientes Edges Vision Data Access functions se insertan automáticamente en la hoja de cálculo para crear la tabla de resultados:
Nota:
|