Edge
Dans la terminologie de la vision industrielle, un bord (ou contour) est défini comme une limite de ligne, d’arc ou de cercle, entre deux groupes de pixels adjacents dont les valeurs de niveaux de gris sont contrastées. Les outils de bords In-Sight sont utilisés pour détecter et traiter les statistiques associées aux bords trouvés.
Présentation de la détection des bords
Les fonctions de l’outil de bords In-Sight détectent les bords en examinant une région d’intérêt (ROI) à la recherche de discontinuités dans la polarité des pixels, c’est-à-dire une zone de l’image où il y a un changement brusque entre les pixels clairs et sombres (ou vice versa). Un bord peut ne couvrir que deux ou trois pixels, parfois plus.
Edge – Exemple
Les bords peuvent être constitués d’un bord simple ou d’une paire de bords, autrement dit deux transitions de sombre à clair ou de clair à sombre. La figure suivante montre les types de bords possibles :
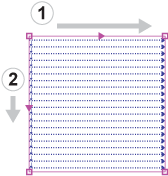
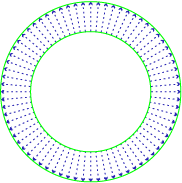
Lorsqu’un outil de bords, tel que les fonctions Caliper, FindLine ou FindCircle, est inséré dans la feuille de calcul, la ROI est analysée pour détecter toute discontinuité dans les valeurs de pixels. La figure ci-dessous illustre le sens dans lequel les régions rectangulaires et annulaires sont balayées à la recherche de caractéristiques de bords. Dans la région rectangulaire, le sens de balayage (indiqué par les deux flèches directionnelles) part du coin supérieur gauche, et se poursuit jusqu’à l’extrémité du côté droit, puis continue le motif jusqu’à atteindre le coin inférieur droit.
Sens de balayage – Régions rectangulaires et annulaires
Au cours de ce processus, un histogramme de niveaux de gris est calculé pour la ROI : les zones définies par un contraste élevé (différence entre les valeurs en niveaux de gris trouvées dans la ROI), et comprises dans les valeurs des autres paramètres spécifiés, définissent un bord.
Le graphique de résultat de bord (visible lorsque le paramètre Afficher est défini sur tout afficher : entrée, résultat et graphique) affiche la première dérivée des valeurs de niveaux de gris trouvées dans la ROI. Des crêtes et des creux représentent les principales transitions de bords, tels qu’illustrés sur la figure ci-dessous. Le paramètre Score minimum/Contraste minimum est utilisé pour définir une hauteur minimale de crête (seuil de contraste). S’il est activé, toutes les crêtes d’une hauteur inférieure à la valeur minimale sont exclues des résultats. Cette action permet de limiter l’analyse de l’inspection aux seuls bords de l’image qui ont une certaine amplitude. Utilisez le graphique de résultat de bord de la fonction pour déterminer le seuil de contraste approprié.
Graphique de résultat de bord – Exemple
- L’axe Score est défini par le Score (entre 100 et -100) et le paramètre Seuil d’acceptation défini pour l’outil. Les crêtes (ou scores positifs) indiquent que le bord passe du sombre au clair, tandis que les creux (ou scores négatifs) indiquent l’inverse : le passage du clair au sombre. Si le score obtenu est 0, aucun bord n’a été détecté.
- L’axe Offset se réfère à la ROI de détection de la caractéristique de bord. 0 correspond au début de la région et la valeur de droite indique la largeur maximale (en pixels) de la région. Le sommet des crêtes et des creux le long de l’axe Offset indique la position du bord trouvé au sein de la ROI.
Largeur des bords – Filtrage des bords
Le paramètre Largeur des bords est utilisé pour supprimer le bruit de l’image d’entrée et accentuer les crêtes des profils de bords. La taille du paramètre Largeur des bords doit être spécifiée de manière à correspondre précisément à la taille des bords de l’image, et la crête doit être nette et abrupte (et non faible et progressive). La taille d’un bord correspond à la largeur en nombre de pixels. Un bord peut être net, ne s’étendant que sur un ou deux pixels, ou estompé : il s’étend alors sur plusieurs pixels. Définir un paramètre Largeur des bords proche de la taille du bord permet à la fonction de générer des crêtes de bords plus forts dans l’image. À l’inverse, un paramètre Largeur des bords inapproprié, trop grand ou trop petit, va générer des crêtes larges et faibles dans l’image.
Résultats de bord
Une fois le bord défini, la fonction Outil de bords crée automatiquement une structure de données Edges et un tableau de résultats contenant des données propres à celui-ci. Les informations renvoyées peuvent être utilisées par d’autres Outils de vision In-Sight comme entrée de repère, ou utilisées par d’autres fonctions de l’outil de bords pour extrapoler davantage les données relatives au bord.
Circonstances d’utilisation des outils de bords
Les outils de bord doivent être utilisés dans les cas suivants :
- Le bord doit présenter un contraste élevé entre les pixels clairs et sombres.
- L’application nécessite une détection rapide des caractéristiques. Les outils de bords sont parmi les outils de vision In-Sight les plus rapides : ils peuvent détecter les caractéristiques de bord plus rapidement que les motifs, par exemple.
Intérêts des outils de bords
La détection des bords et l’extrapolation des données peuvent être extrêmement utiles dans de nombreux cas, notamment :
- Applications de calibrage, telles que la mesure du rayon des caractéristiques circulaires sur les joints, ou la mesure de la longueur des circuits sur un circuit imprimé.
- Détection d’éléments circulaires ou extrémités droites des pièces, afin de les utiliser comme entrées de repère pour d’autres outils de vision In-Sight.
- Applications de détection ou non-détection de caractéristiques de bords.
- Applications de comptage et de classement, dans lesquelles les outils de bord sont utilisés pour compter et classer les bords en fonction de leurs paramètres établis.
Utilisation des outils de bords
Les outils de bords sont généralement utilisés de la façon suivante :
- Étape 1 – L’image est analysée, indiquant par la suite qu’un outil de bords répondrait aux exigences de l’application.
- Étape 2 – L’un des outils de bords, par exemple Caliper, FindCircle, FindCircleMinMax, FindCurve, FindLine, FindMultiLine ou encore FindSegment, est inséré dans la feuille de calcul et les paramètres sont configurés pour définir et détecter le bord ou les paires de bords dans l’image.
- Étape 3 – Un autre outil de bords (PairDistance, PairEdges, PairMaxDistance, PairMeanDistance, PairMinDistance, PairSDevDistance, PairsToEdges ou SortEdges) est inséré pour filtrer, calculer ou classer les bords ou paires de bords trouvés, en fonction de critères spécifiques.