Caliper
Cette fonction a été développée pour effectuer plusieurs types d’inspections au niveau des bords, tels que mesurer la largeur des objets, déterminer l’emplacement des bords simples et l’emplacement/l’espacement des paires de bords. La fonction Caliper est la fonction Edge la plus précise, mais l’installation et la configuration prennent davantage de temps.
Caliper – Présentation
La fonction Caliper est utilisée pour analyser une image et localiser un bord unidimensionnel, c’est-à-dire un changement dans les valeurs de niveaux de gris des pixels voisins. La fonction analyse une zone spécifique de l’image (définie par le paramètre Région) et recherche un bord dans les valeurs de niveaux de gris des pixels, de sombre à clair ou de clair à sombre, dans une direction. La fonction peut repérer deux types de transition : les bords simples et les paires de bords, séparées par une largeur attendue.
La fonction Caliper est parfaitement adaptée lorsqu’elle est utilisée pour développer des informations détaillées sur les emplacements précis des caractéristiques de bord, dans ou autour d’un objet. Par exemple, la fonction peut être utilisée pour compter le nombre de broches sur une carte, mesurer la largeur d’une pièce ou trouver des points de bord utilisables comme entrée par un autre outil de vision. La fonction repère les bords simples, ou les paires de bords, à l’aide d’un modèle. Dans celui-ci, les crêtes potentielles des bords sont détectées à l’aide d’un simple noyau 1D, puis notées par rapport à un modèle et des méthodes de notation.
Une fois que l’emplacement et l’orientation des bords d’intérêt dans l’image ont été déterminés, la fonction Caliper peut être utilisée :
- Configurez la Region de sorte qu’elle englobe les bords ou les paires de bords.
- Sélectionnez le paramètre Mode de bord correspondant (bord simple ou paire de bords) et indiquez le nombre de bords à trouver, puis définissez les paramètres Bord : Premier, Bord : Deuxième, et Bord : Distance pour créer un modèle de bords, comprenant la polarité, le positionnement et l’espacement.
- Définissez les paramètres Largeur des bords et Contraste minimum pour isoler les bords ou les paires de bords.
- Indiquez la méthode de notation utilisée pour donner un score aux bords candidats.
Configuration de la région
Lors du positionnement de la région, assurez-vous que le sens de balayage permet d’identifier correctement les bords souhaités. Le sens de balayage doit être orienté vers le premier bord à détecter. L’emplacement des bords est déterminé en fonction de l’endroit où ils sont détectés, par rapport au centre de la région.
Isoler des bords et définir un modèle de bords
Une fois que les bords ont été repérés dans la région, la fonction Caliper génère un score pour chaque bord potentiel sur l’image. Le score de chaque bord est calculé en fonction de la correspondance entre le bord de l’image actuelle et le bord idéal défini. Les bords de l’image actuelle sont considérés comme des « bords candidats », tandis qu’un bord idéal est appelé « modèle de bords » (qu’il s’agisse d’un bord simple ou d’une paire de bords).
Modèle de bords
Pour évaluer si un bord candidat sur l’image correspond bien au bord recherché, il est important de définir un modèle décrivant précisément le bord d’intérêt. Pour définir un modèle de bords, il faut d’abord définir le type de bord : simple ou paire. Ensuite, il est nécessaire de définir le nombre de types de bords à repérer dans la région. Une fois cela fait, indiquez la polarité (blanc-noir ou noir-blanc), la position de chaque bord dans le modèle, spécifiée par la position des bords par rapport à la région, et l’espacement entre les bords si des paires sont définies.
Détection des bords, détection des crêtes avec seuil de contraste minimum
Le paramètre Largeur des bords est utilisé pour supprimer le bruit de l’image d’entrée et accentuer les crêtes des profils de bords. Utilisez le paramètre Contraste minimum pour définir une hauteur de crête minimale (c’est-à-dire, un seuil de contraste).
Attribution de score avec Mode de bord
Une fois que la fonction Caliper a filtré la région et généré une liste des crêtes de bords dépassant le seuil de contraste spécifié, la fonction calcule un score pour chaque bord candidat de l’image. Avec ce score, il est possible de déterminer les bords qui représentent des instances des bords réels d’intérêt, telles que définies par votre modèle de bords.
La fonction Caliper calcule le score de chaque bord candidat en comparant celle-ci par rapport au modèle de bords, sur la base d’un ensemble de critères de notation définis par l’utilisateur, appelés méthodes de notation.
Une méthode de notation se compose de deux parties :
- – un type de méthode de notation qui définit la mesure du bord à évaluer ;
- – une fonction de score qui définit la relation entre la mesure brute et le score mappé, généré pour la méthode de notation.
Plusieurs méthodes de notation peuvent être définies. La fonction Caliper applique toutes les méthodes de notation définies à chaque bord candidat de l’image, et établit un score global pour chacun d’entre eux. La définition de méthodes de notation appropriées permet de s’assurer que le bord candidat avec le score le plus élevé sera le bord d’intérêt.
Types de méthodes de notation
La fonction Caliper détermine le score d’un bord candidat en évaluant le degré de correspondance entre le bord candidat et le modèle de bord. L’utilisateur peut ajuster le paramétrage de la mesure de correspondance de l’outil. Les types de mesures paramétrables sont appelés « types de méthodes de notation ». Il en existe quatre : Contraste, Position, Taille et Écartement.
Lorsque la fonction applique un type de méthode de notation à un bord candidat, le résultat est un score brut. Le score brut est différent selon les types de méthode de notation. Les types de méthode de notation et leurs scores bruts sont décrits dans les sections suivantes.
Méthodes de notation Contraste
Les bords candidats peuvent être notés en fonction de leur contraste. Le contraste d’un bord se calcule de la façon suivante : changement de la valeur des pixels divisé par la taille du bord, en pixels. Le score brut d’une méthode de notation des contrastes est normalisé de sorte qu’une valeur de 100 est égale à un contraste de 256 (valeur maximale possible pour le contraste). Si un modèle de paire de bords est spécifié, le score brut correspond à la moyenne du contraste des deux bords.
Méthodes de notation Position
Les bords candidats peuvent être notés en fonction de leur position par rapport au centre de la région. La position peut être définie comme la distance entre le centre et le point d’origine du modèle au sein du bord candidat. Si le bord d’intérêt est attendu à une distance spécifique du centre de la région, une méthode de notation absolue des positions peut être définie, et le score brut est alors exprimé sous la forme d’une distance absolue en pixels. Si un modèle de paire de bords est utilisé et que la différence de position entre le bord candidat et le centre de la région (par rapport à la taille du modèle) doit être prise en compte, il est nécessaire de définir une méthode de notation relative des positions. Dans ce cas, le score brut est normalisé : une valeur de 100 signifie que la distance était égale à la taille du modèle.
Méthodes de notation Taille
Si un modèle de paire de bords est utilisé, les bords candidats peuvent être notés selon la différence de largeur entre les bords du candidat et les bords du modèle. La méthode de notation de la taille peut être définie comme étant absolue, auquel cas le score brut sera renvoyé sous forme d’une différence de taille absolue en pixels. Si la différence de taille par rapport à la taille du modèle doit être qualifiée, il est nécessaire de définir une méthode de notation de la taille relative. Dans ce cas, le score brut est normalisé : une valeur de 100 signifie que la différence de taille était égale à la taille du modèle.
Méthodes de notation Écartement
Si un modèle de paire de bords est utilisé, les paires candidates peuvent être notées selon la présence ou non des deux bords de part et d’autre du centre de la région. Ce type de méthode de notation peut être utilisé pour trouver des objets définis par une paire de bords qui devraient se trouver sous le centre de la région. Le score brut renvoyé est interprété comme suit : si égal à 100, le centre de la région fait l’objet d’un écartement par les bords ; si égal à 0, aucun écartement n’a lieu.
Fonctions de score
Pour chaque méthode de notation, le type de méthode sélectionné génère un score brut. Le paramétrage d’une fonction de score impacte de différentes façons le score global d’un bord candidat par l’intermédiaire de ce score brut. Une fonction de score fait correspondre un score brut à un score mappé. Les scores mappés pour chaque méthode de notation de bord candidat sont combinés pour former le score global de ce bord candidat.
Caliper – Onglet Général
| Paramètre | Description | ||||||||||||
|
Image |
This parameter must reference a spreadsheet cell that contains an Image data structure; by default, this parameter references A0, the cell containing the data structure. This parameter can also reference other Image data structures, such as those returned by the Image Vision Data Access functions or Fonctions de conversion de coordonnées. |
||||||||||||
|
Repère |
Définit la région d’intérêt (ROI) par rapport à l’entrée d’un Fixture ou à la sortie du système de coordonnées de l’image d’une fonction Outils de vision. En définissant la ROI par rapport à un Repère, toute rotation ou translation de ce dernier entraînera systématiquement une rotation/translation de la ROI, le cas échéant. Le paramètre par défaut est (0,0,0), le coin supérieur gauche de l’image.
|
||||||||||||
|
Région |
Aussi appelé région d’intérêt (ROI), spécifie la région de l’image qui fait l’objet d’une analyse. Effectuez un double-clic sur le paramètre Région pour créer un Mode Graphiques interactifs que vous pouvez transformer et faire pivoter. Sélectionnez ce paramètre et cliquez sur le bouton Agrandir la région dans la barre d’outils Modification du projet de la feuille de propriétés pour agrandir automatiquement la région pour qu’elle couvre l’intégralité de l’image.
|
||||||||||||
|
Remarque : Les paramètres Repère et Région doivent être ajustés en fonction des limites de l’image. S’ils sont hors limites, la fonction renvoie #ERR.
|
|||||||||||||
|
Mode de bord |
Indique si la fonction doit repérer un ou deux bords.
|
||||||||||||
|
Nombre à chercher |
Détermine le nombre maximum de bords (simples ou paires) à renvoyer (1 à la largeur de l’image de la caméra In-Sight, moins 1 ; par défaut = 1). Le nombre maximum de bords détectables est inférieur d’une unité à la largeur d’image de la caméra In-Sight capturant l’image (par exemple, le maximum d’une caméra ISC 8402 est 1599, soit une unité de moins que la résolution d’image 1600×1200 du système de vision). S’il y a plus de bords simples ou paires de bords dont les scores dépassent la valeur du paramètre Seuil :Accepter, les bords (simples ou paires) ayant les scores les plus élevés seront sélectionnés. |
||||||||||||
|
Contraste minimum |
Indique le contraste minimum (compris entre 0 et 100 ; par défaut = 5) pour les bords simples et les paires de bords. La valeur de contraste est normalisée à partir de l’histogramme des niveaux de gris dans la région, sur une échelle de 0 à 100. La fonction ne renvoie que les bords (simples ou paires) dont les valeurs de contraste sont supérieures à ce paramètre. |
||||||||||||
|
Seuil : Accepter |
Détermine le score de correspondance minimum acceptable (compris entre 0 et 100 ; par défaut = 5) pour les bords candidats. La fonction ne renvoie que les bords (simples ou paires) dont le score de correspondance est supérieur à cette valeur. Le score de correspondance correspond à la moyenne géométrique de toutes les méthodes de notation spécifiées. |
||||||||||||
|
Largeur des bords |
Détermine la distance de pixels (1 à 50 ; 2 par défaut) au-delà de laquelle on est en présence d’une transition. La Largeur des transitions est utilisée pour filtrer l’image avant l’extraction des transitions. |
||||||||||||
|
Bord : Premier |
Détermine la polarité du premier bord d’une paire, par rapport au sens du balayage dans la région. Lorsqu’elle est définie comme noir/blanc ou blanc/noir, la fonction ne signale que les paires de bords dont le premier des deux présente la polarité spécifiée.
|
||||||||||||
|
Bord : Deuxième |
Détermine la polarité du second bord d’une paire, par rapport au sens du balayage dans la région. Lorsqu’elle est définie comme noir/blanc ou blanc/noir, la fonction ne signale que les paires de bords dont le second des deux présente la polarité spécifiée. Remarque : Ce paramètre est utilisé uniquement lorsque le paramètre Mode de bord est défini sur Paire de bords.
|
||||||||||||
|
Bord : Distance |
Indique la distance en pixels (1 à 3 fois la largeur du système de vision In-Sight ; par défaut = 10) entre les deux bords formant une paire. Ce paramètre est utilisé uniquement pour le mode Paire de bords. Si la distance entre les bords est supérieure à la largeur de la région, la fonction renvoie #ERR. Si la région n’est pas tournée ou courbée, cette valeur doit être inférieure ou égale à Région > Largeur. Remarque : La largeur d’image du système de vision In-Sight concerne le système spécifique qui capture l’image (par exemple, la valeur maximale d’un système de vision In-Sight 5100 est 1920, soit 3 fois la largeur de la résolution d’image 640×480 du système de vision).
Les dimensions des outils 2D sont 640 × 480. Cependant, elles sont désormais 1430 × 1006 pour le 3D - A1000, et 2880 × 8000 pour le 3D - L4000. Ainsi, le nombre maximum de lignes actuellement acquises par les systèmes de vision Série A1000 est 1430, et 2880 pour la Série L4000. La largeur maximale pour les périphériques In-Sight A1000 est 1006, et 8000 pour les périphériques In-Sight L4000. |
||||||||||||
|
Afficher |
Détermine le mode d’affichage des graphiques superposés de Caliper sur l’image.
|
||||||||||||
Caliper – Onglet Méthodes de notation
L’onglet Méthodes de notation permet de sélectionner et de modifier les fonctions de score utilisées pour donner un score aux bords candidats par rapport au modèle de bord. Pour chaque bord candidat, une fois que la fonction Caliper a calculé le score brut d’une méthode de notation sélectionnée et appliqué la fonction de score, un score global est calculé. Le score global est calculé en prenant la racine N du produit des scores mappés. Exemple : si quatre méthodes de notation sont définies, la fonction Caliper multiplie les quatre scores et prend la racine 4 du résultat (si une seule fonction de score produit une valeur de 0, le score global du candidat est également 0).
L’onglet Méthodes de notation de Caliper comporte trois parties :
- Ajouter une fonction de score
- Fonctions de score actuelles
- Modifier les paramètres de méthode de notation
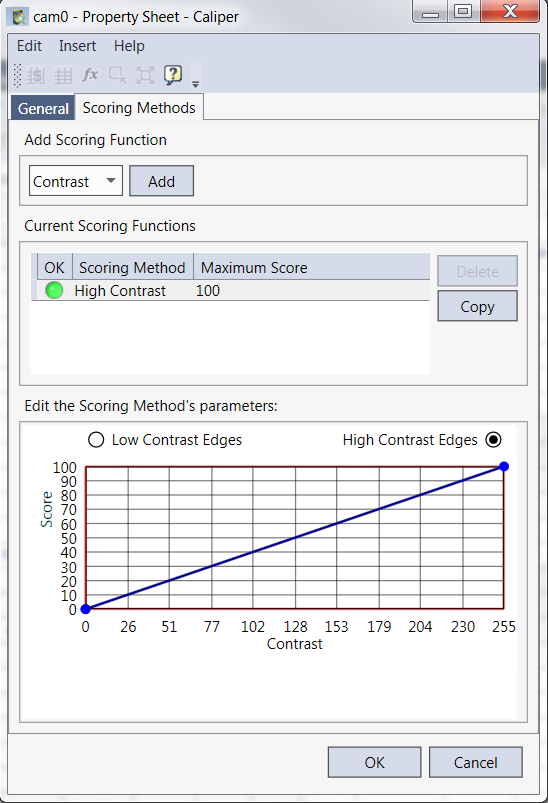
Fonctions de score
Dans la section Ajouter une fonction de score, choisissez Position, Contraste, Taille ou Écartement dans le menu déroulant. Cliquez sur le bouton Ajouter pour valider.
| Paramètre | Description |
|
Position |
Disponible pour les bords (simples et paires), cette méthode de notation est basée sur la position du bord, ou de la paire de bords, par rapport au côté gauche ou au centre de la région. Réglez les paramètres de notation pour attribuer des scores, compris entre 0 et 100, aux bords (simples ou paires) en fonction de leur proximité avec le côté gauche de la région. Lorsque la case Région centrée est cochée (par défaut), les bords ou paires de bords sont notés en fonction de leur position par rapport au centre de la région. Sélectionnez la case d’option Bord extérieur ou Bord centré comme base du calcul du score. Les bords centrés sont les plus proches du centre de la région, tandis que les bords extérieurs sont les plus éloignés. Si la case Région centrée n’est pas cochée, la notation se base sur la position relative au côté gauche ou au côté droit de la région. Sélectionnez la case d’option Bords côté gauche ou Bords côté droit comme base du calcul du score. La case à cocher Normaliser avec la distance entre les paires de bords (uniquement pour les paires de bords), permet de diviser la distance entre les bords de la paire par la valeur du paramètre Bord :Distance avant de calculer le score. Cette option permet de tenir compte des changements de taille dans la région en utilisant une valeur en pourcentage, au lieu d’une valeur réelle, pour calculer le score. Remarque : L’option Normaliser sur la distance entre les paires de bords est uniquement disponible pour les paires de bords.
|
|
Contraste |
Disponible pour les bords (simples et paires), cette méthode de notation est basée sur le contraste du bord candidat, correspondant au changement de contraste entre un pixel et ceux adjacents. Pour les paires de bords, le contraste moyen des deux bords est utilisé. Réglez les paramètres de notation pour attribuer des scores, compris entre 0 et 100, aux bords (simples ou paires) en fonction du contraste. La base de calcul du score peut être soit des Bords à faible contraste, soit des Bords à contraste élevé. |
|
Taille |
Remarque : Disponible uniquement pour les paires de bords.
Cette méthode de notation est basée sur la distance (taille) entre les paires de bords. Réglez les paramètres de notation pour attribuer des scores, compris entre 0 et 100, aux paires de bords en fonction de leur taille.
La case à cocher Utiliser la différence de distance entre les paires de bords se base sur la distance réelle pour calculer le score en utilisant des distances plus ou moins éloignées de la valeur du paramètre Bord :Distance (en pixels) comme base de calcul du score. Si elle est non cochée, la base de calcul du score prend en compte les distances entre les bords qui sont plus grandes/petites que la valeur du paramètre Bord :Distance attendue. La case Utiliser la différence symétrique (décochée par défaut) permet de mettre la région à l’échelle. Lorsqu’elle est cochée, les tailles qui sont plus petites/grandes que la valeur du paramètre Bord :Distance peuvent être spécifiées. Ce paramètre permet d’accepter un changement dans un sens, tout en ignorant l’autre. Par exemple, il est possible d’autoriser des distances plus petites, tout en paramétrant la méthode pour que les distances plus grandes soient moins bien notées. |
|
Écartement |
Remarque : Disponible uniquement pour les paires de bords.
Cette méthode de notation est basée sur la présence ou non des deux bords de part et d’autre du centre de la région. Ce type de méthode de notation peut être utilisé pour trouver des objets définis par une paire de bords qui devraient se trouver sous le centre de la région de l’image. Le score est égale à 100 si les bords de paires font l’objet d’un écartement avec le centre de la région de l’image. Dans le cas contraire, le score est de 0. |
Fonction de score actuelle
Cette section décrit l’état et la configuration des fonctions de score actuelles. Par défaut, une fonction de score à contraste élevé est initialement créée. Les fonctions peuvent être dupliquées avec le bouton Copier ou supprimées avec le bouton Supprimer.
| Label | Description |
| OK |
Un voyant d’état : Rouge = méthode de score invalide pour le mode de bord Caliper actuel. |
| Méthode de score | Affiche le type de fonction de score et tout paramètre supplémentaire configuré dans la section Modifier le paramètre de la méthode de score. |
| Score maximum | Le score maximum d’une fonction (par défaut 100) peut être ajusté dans la section Modifier le paramètre de la méthode de score. |
Modifier les paramètres de méthode de notation
Cette section comporte un tableau interactif qui permet d’effectuer des ajustements en cliquant sur un point et en le déplaçant vers le réglage souhaité. Les paramètres disponibles sont basés sur le type de fonction de score.

|
Le curseur devient une poignée de contrôle après avoir cliqué sur un point. Le point peut être déplacé avec la souris, ou avec les touches fléchées pour un contrôle plus précis. Selon la configuration, certains points auront des positions possibles restreintes et d’autres ne pourront pas être repositionnés. |
Les fonctions de score sont définies en spécifiant des valeurs d’entrée et de sortie basses et hautes. Il existe deux types de fonctions de score : les fonctions de score unilatérales et bilatérales.
Fonctions de score unilatérales
Pour configurer la fonction de score, il est nécessaire de définir les valeurs de xC, x1, x0, y1 et y0. Les valeurs de y0 et y1 doivent être comprises entre 0 et 100. Les valeurs de xC, x1 et x0 peuvent inclure des valeurs négatives (à indiquer si un ou plusieurs des points xC, x1 et x0 est susceptible de produire un score brut inférieur à zéro), et leur plage est déterminée par le type de méthode de notation sélectionné. La fonction de score définie fait correspondre les scores d’entrée aux scores de sortie de la façon suivante :
- Les valeurs d’entrée supérieures à x0 correspondent à un score de sortie de y0.
- Les valeurs d’entrée inférieures à xC correspondent à un score de sortie de 0.
- Les valeurs d’entrée comprises entre xc et x1 correspondent à un score de y1.
- Les valeurs d’entrée comprises entre x1 et x0 correspondent, de façon linéaire, avec l’intervalle de scores compris entre y1 et y0.
L’exemple de fonction de score illustré ci-dessus est approprié lorsque les scores d’entrée plus élevés sont susceptibles de produire des scores de sortie plus élevés, comme une méthode de score Contraste où un contraste de bord plus important est susceptible de produire un score plus élevé.
Fonctions de score bilatérales
Si une paire de bords est utilisée, une fonction de score bilatérale peut être définie pour noter les bords candidats plus petits que le modèle de bord, distinctement des bords candidats plus grands que le modèle de bord. La figure ci-dessus est un exemple de fonction de score bilatérale qui est plus tolérante à l’égard des bords candidats plus grands que le modèle de bord ne l’est avec des bords candidats plus petits. Dans cet exemple, si le bord candidat a exactement la même taille que le modèle de bord, le score d’entrée est de 0. Si le bord candidat est plus petit que le modèle de bord, le score d’entrée est inférieur à 0. À l’inverse, s’il est plus grand que le modèle de bord, le score d’entrée sera supérieur à 0.
Si une fonction de score bilatérale est spécifiée, le score brut est normalisé de sorte qu’un bord candidat plus petit que le modèle de bord, avec une différence égale à la taille du modèle de bord, reçoit un score d’entrée de -100. À l’inverse, un bord candidat plus grand que le modèle de bord, avec une différence égale à la taille du modèle de bord, reçoit un score d’entrée de 100.
Caliper – Sorties
|
Renvoie |
Une structure de données Edge contenant des paires de bords, ou #ERR si l’un des paramètres d’entrée est incorrect. |
|||||||||||||||||||||||||||
|
Résultats |
Lorsque la fonction Caliper est insérée dans une cellule, un tableau de résultats est créé dans la feuille de calcul. Les Vision Data Access functions Edges suivantes sont automatiquement insérées dans la feuille de calcul pour créer le tableau de résultats :
Remarque :
|