Field Correction
Field correction is a semi-automatic and user-friendly process that helps with setting up your L38 vision system and ensuring accurate measurements.
Field correction uses a Cognex-specific correction target to adjust for typical mounting variations in the application, such as misalignment in the displacement sensor head or unknown encoder resolution. Field correction guides you through scanning the target and automatically compensates for the following deviations:
-
Automatically adjusts the point cloud acquisition to any encoder that is connected to the system.
-
Corrects misalignments that can happen during mounting on all three axes if the camera coordinate system is not perfectly aligned with the direction of motion. This allows you to acquire a point cloud and perform measurements from an optimal camera alignment without having to adjust the camera mount.
When the L38 is mounted on a frame, the vision system and the motion stage is not 100% aligned:
|
|
|
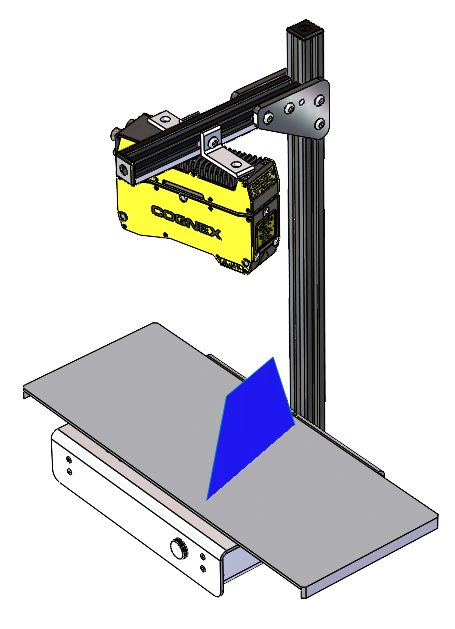
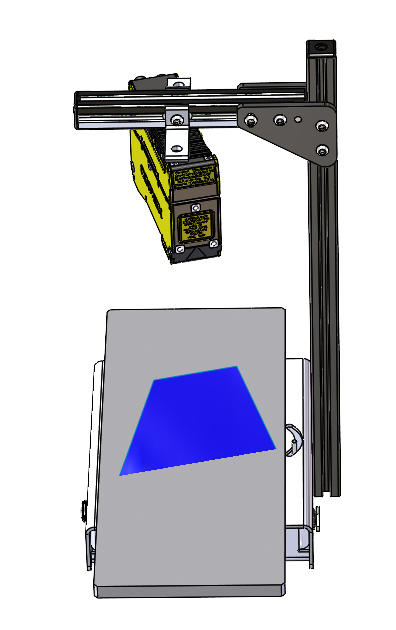
To produce a precise 3D image of a scene, it's essential to correct the relative motion between a vision system and a motion stage, involving motion direction, motion speed, and alignment of the three axes. Failure to address motion direction and speed can result in skewed, distorted, elongated, or compressed scanned images. Proper alignment of the three axes is crucial to avoid distortions in the overall image.
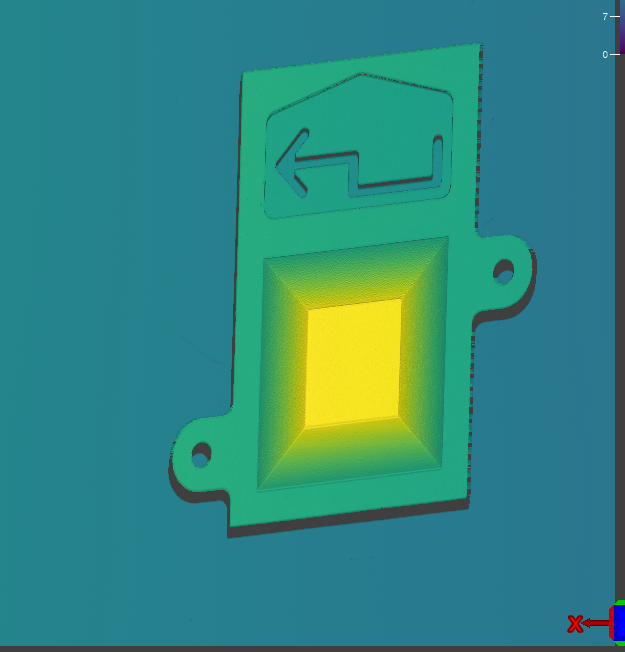
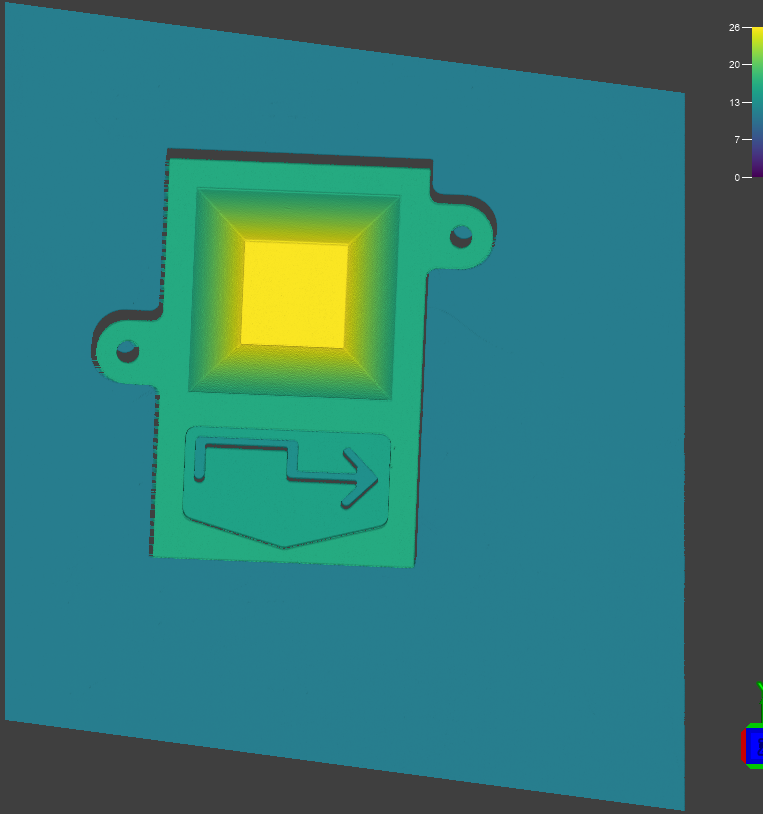
The following images are without field correction:
|
|
|
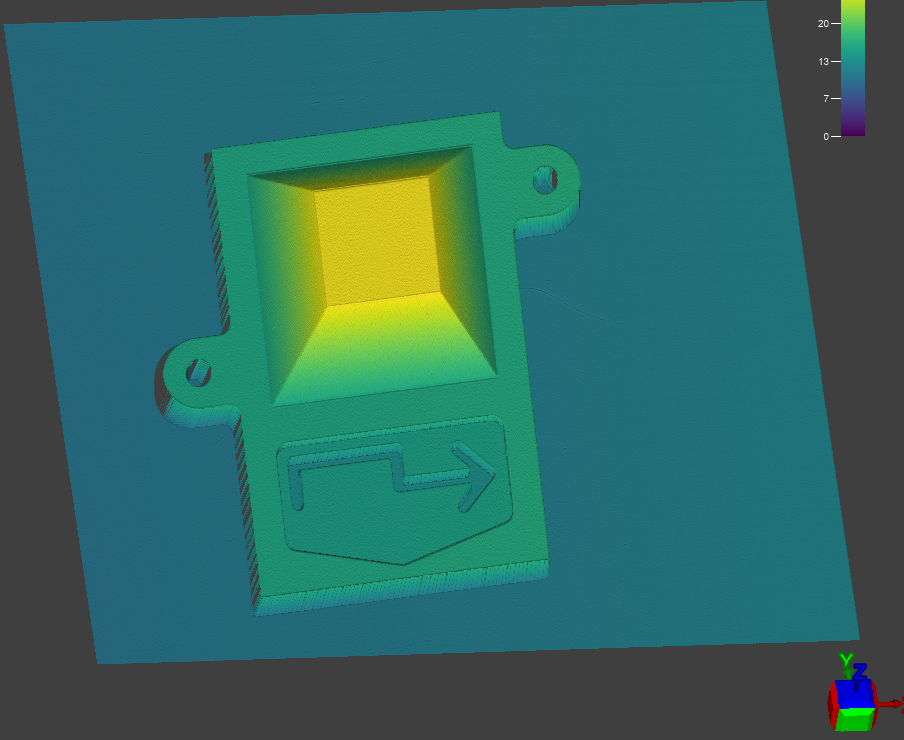
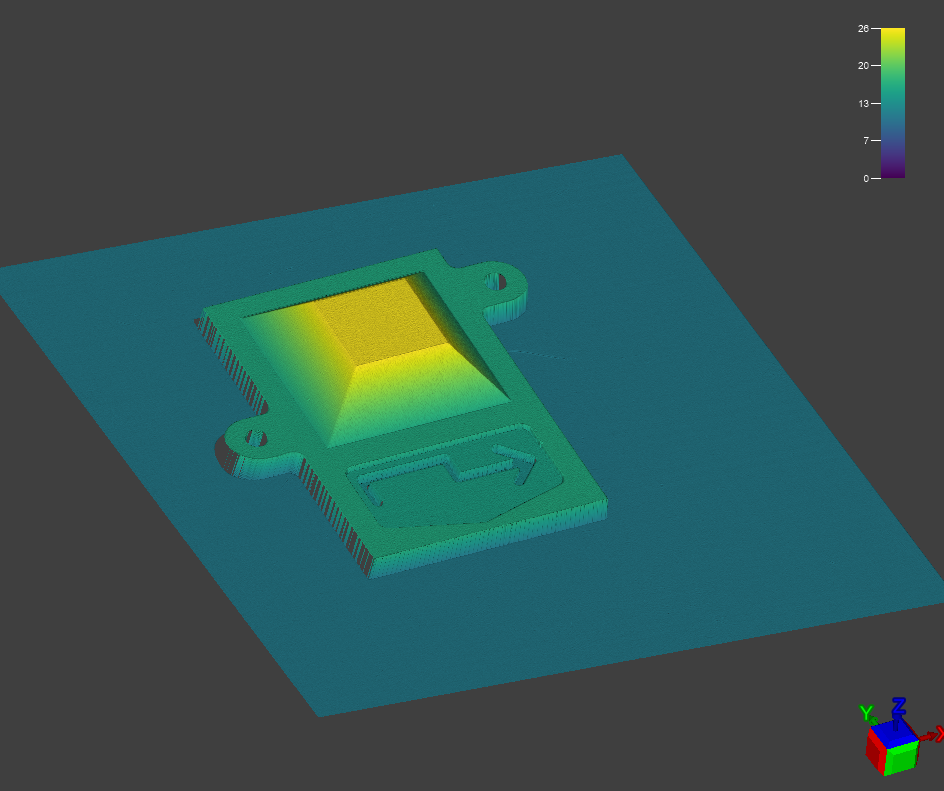
The following images are corrected with field correction:
|
|
|
For more information about field correction settings, see the Correction Settings section in the In-Sight 3D Spreadsheet Help document.
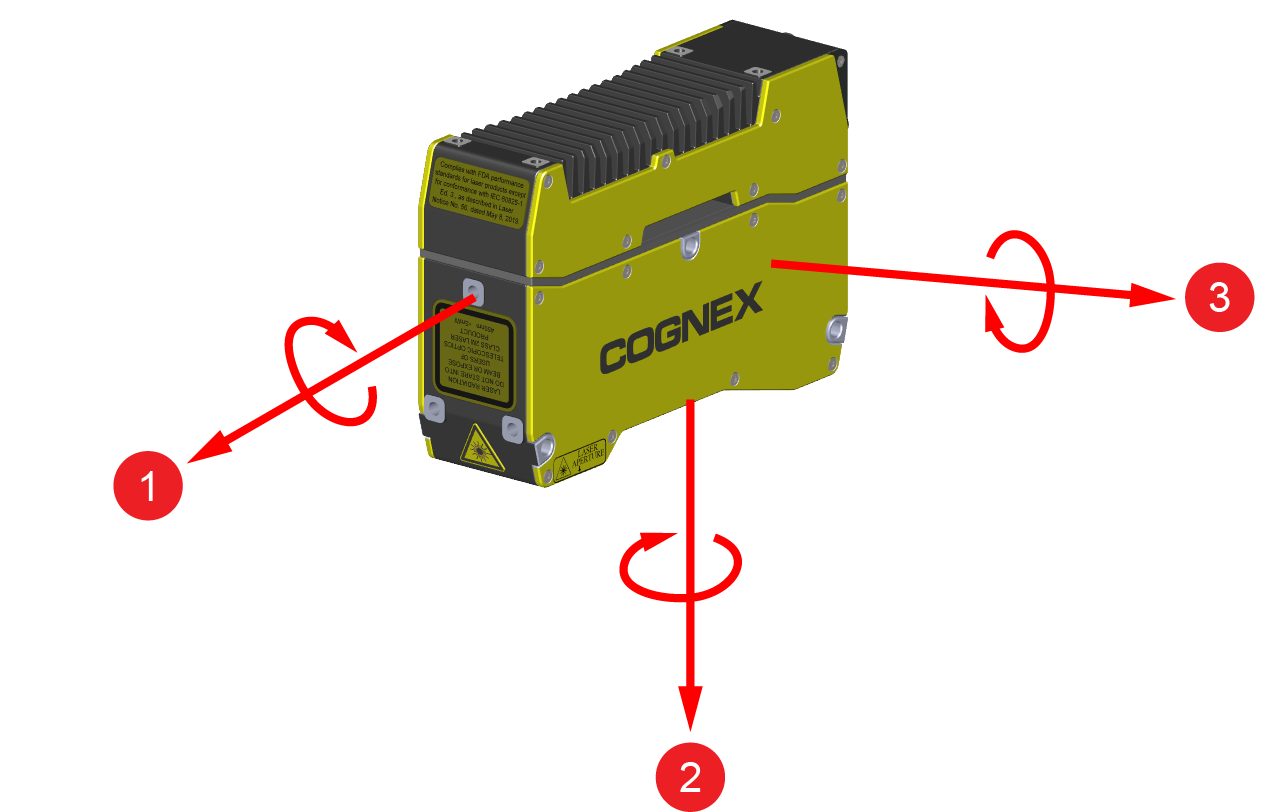
The L38 can correct the following degrees of misalignment:
|
|
|---|---|
| Number | Description |
| 1 | Roll: 5 degrees |
| 2 | Yaw: 10 degrees |
| 3 | Pitch: 5 degrees |