设置机器人工具中心点(TCP)
工具中心点(TCP)是机器人与工作部件接触的部分。您需要设置TCP,以便机器人可以从多个角度(称为“航路点”)移动到相同的位置。
TCP必须位于视觉系统的视野范围内。
注意:该过程是PolyScope软件固有的,为方便起见,本文档中也包含此过程。
- 启动 PolyScope 软件。
- 在主菜单中,选择 Program Robot。新建程序窗口打开。
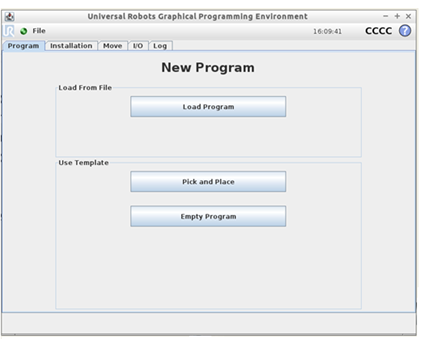
- 选择 Pick and Place。
- 选择 Installation> TCP Configuration。
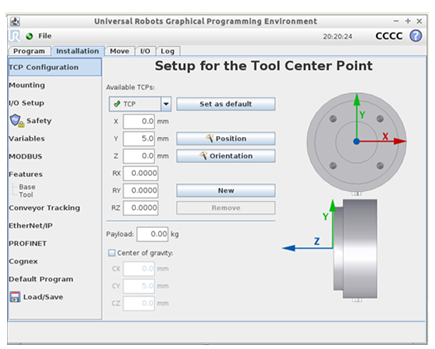
- 要指定 TCP,您可以通过以下方式手动测量它们:
- 如果 TCP 直接位于Z轴上,则测量 TCP 与工具法兰盘中心之间在Z轴上的距离(以毫米为单位)。在Z输入框中输入测量值。
- 如果 TCP 不直接位于Z轴上,则测量 TCP 与工具法兰中心之间在X、Y和Z轴上的距离(以毫米为单位)。然后分别在X、Y和Z输入框中输入测量值。
有关详细说明,请参阅 PolyScope 手册。该手册可以从 Universal Robots 网站下载。