Vision Guided Robotics
Vision Guided Robotics (VGR) uses vision technology to accurately align robot arms with objects in the field of view of the vision system, and automatically adjust to deviations in positioning. In-Sight provides support for VGR applications with an array of spreadsheet functions, and allows you to use either a stationary vision system, or a robot-mounted vision system that moves in conjunction with the robot to perform Guided Pick and and Guided Place tasks.
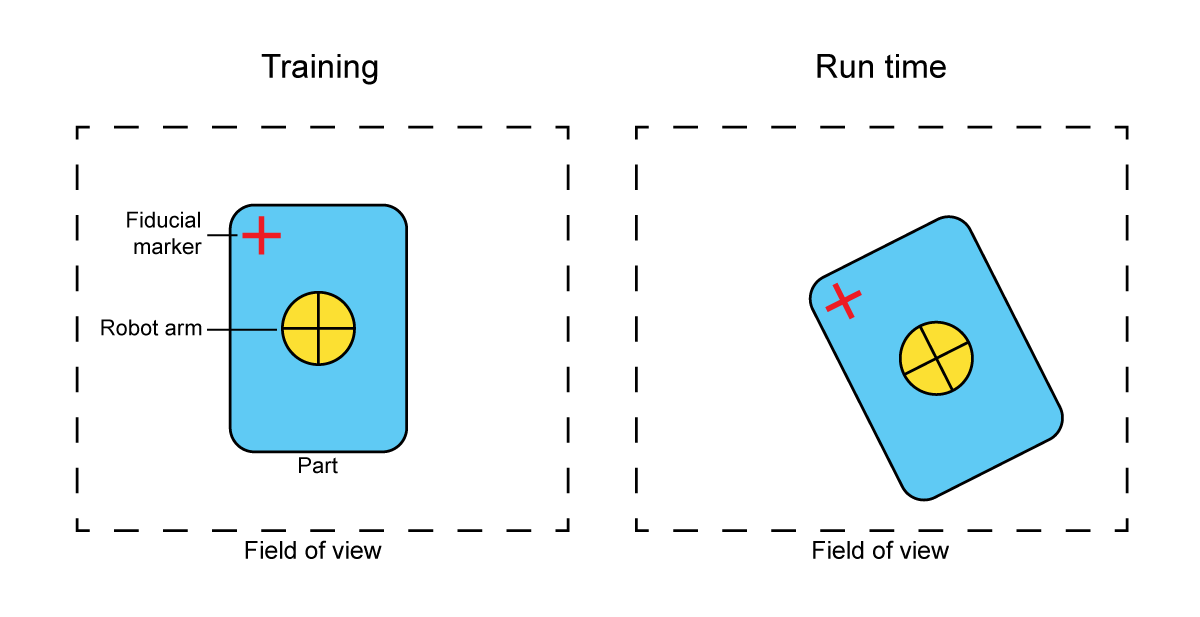
You can set up reference points called fiducial markers for robot arm positioning using standard In-Sight pattern finding tools, and train the robot arm controller to position the robot arm relative to those fiducial markers.
Common VGR applications include the following:
- Inserting connectors of various shapes onto substrate
- Mounting parts of various shapes onto housing
- Loading parts to or unloading parts from testing machine