Guided Pick and Place
The two main applications of Vision Guided Robotics are Guided Pick and Guided Place applications.
-
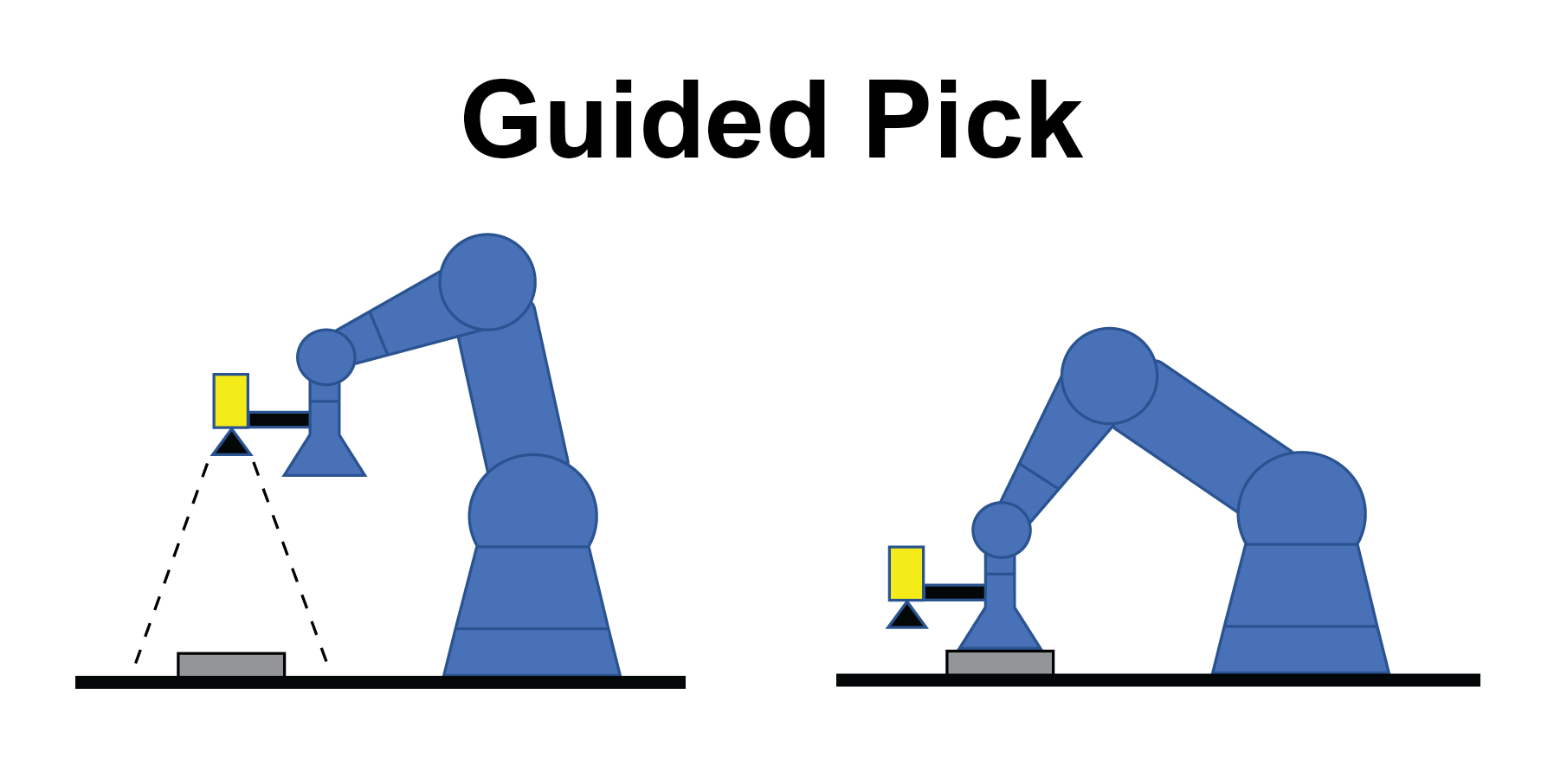
In a Guided Pick application, parts are loaded into the vision system field of view in arbitrary poses. The vision system recognizes the location and angle of the part, and then calculates the optimal robot arm pose based on a trained alignment between the robot arm and a training part.
-
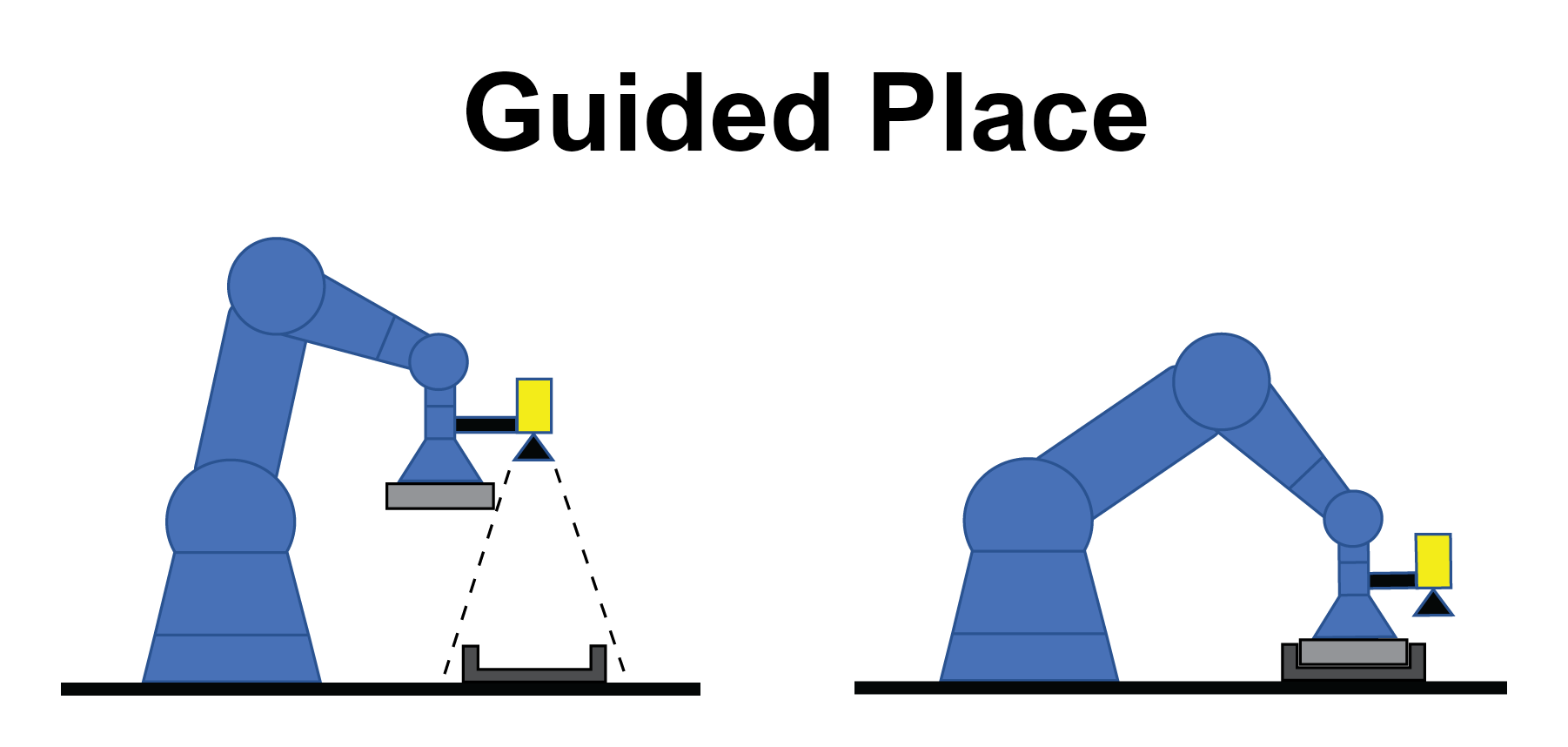
In a Guided Place application, the robot arm is holding the part in a fixed position, and needs to place the part in a specific position, such as onto a tray or into a hole. The vision system identifies the target location in the field of view, and calculates the optimal robot arm pose based on a trained alignment between the robot arm holding a part and a training target location.