安装Cognex In-Sight 2D机器人引导插件
- 前往cognex.com/urcaps并下载Cognex URCaps v1.3.0.urcap文件。
- 将文件传输到USB。
- 启动PolyScope程序。主菜单显示:
- 将USB插入Universal Robot教学器的右侧。
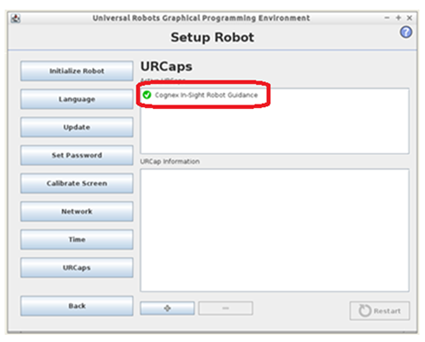
- 在主菜单上,选择Setup Robot>URCaps。单击加号按钮(+)以添加URCap Cognex插件文件,该文件显示名为Cognex In-Sight Robot Guidance。
Cognex In-Sight 2D机器人引导插件将以下内容添加到PolyScope软件中:
- 程序选项卡上的Cognex菜单项(Program > Structure > URCaps > Cognex Camera Pose)。
- 安装选项卡上的Cognex菜单项。
- 机器人程序树中的一个叫做CGX_result:= CameraPose的节点。
- 一个名为CGX_result的新变量将被添加到Program> Command选项卡中。该变量用于存储在触发期间从视觉系统发送的视觉系统位姿信息。