Apprentissage du TCP (point central d'outil)
Le TCP (point central d'outil) est la partie du robot qui entre en contact avec la pièce cible. Vous apprenez ce TCP (point central d'outil) pour que le robot puisse se déplacer à la même position depuis différents angles (appelés « waypoints », points de passage).
Le TCP (point central d'outil) doit être dans le champ de vision du système de vision.
- Exécutez le logiciel PolyScope.
-
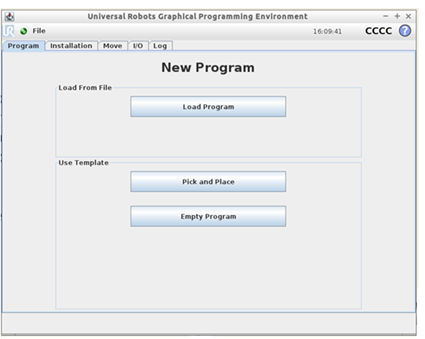
Dans le menu principal, sélectionnez Program Robot (Programmer le robot). La fenêtre New Program (Nouveau programme) s’affiche.
-
Sélectionnez Pick and Place (Bras-transfert).
-
Sélectionnez Installation > TCP Configuration (Installation > Configuration TCP).
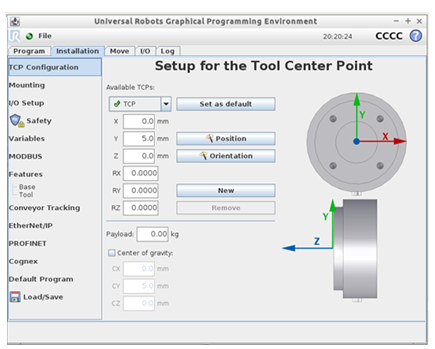
- Pour apprendre le TCP (point central d'outil), vous pouvez le mesurer manuellement de l’une des manières suivantes :
- Si le TCP (point central d'outil) est placé directement sur l’axe Z, mesurez la distance entre le TCP (point central d'outil) et le centre de la bride de l’outil (en millimètres) sur l’axe Z. Entrez cette valeur dans le champ Z.
- Si le TCP (point central d'outil) N’EST PAS placé directement sur l’axe Z, mesurez la distance entre le TCP (point central d'outil) et le centre de la bride de l’outil (en millimètres) sur les axes X, Y et Z. Entrez les valeurs correspondantes dans les champs respectifs X, Y et Z.
Consultez le Manuel PolyScope pour de plus amples informations. Vous pouvez télécharger ce manuel depuis le site Web Universal Robots.