Programar el Universal Robot
Una vez configurada la calibración del robot y las tareas de In-Sight, puede programar su aplicación de recogida y colocación usando MoveL y otros comandos del robot. También puede determinar la acción que realizar al aprobarse o fallar una tarea, o en caso de no haber respuesta desde el sistema de visión. El complemento Cognex In-Sight 2D Robot Guidance facilita el siguiente contexto para empezar:
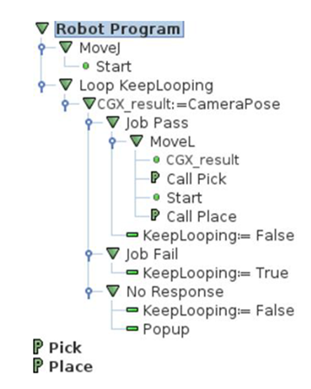
Una vez programada y ejecutada la aplicación, cuando el programa llegue a al nodo CGX_result:=CameraPose, ocurre lo siguiente:
- El robot se comunica con la cámara para localizar la pieza entrenada.
- El sistema de visión dispara y devuelve la pose que representa la ubicación de la pieza.
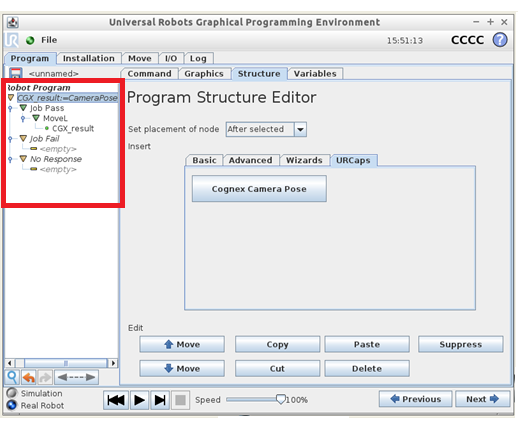
- La pose se almacena en la variable CGX_result, en el Editor de estructura de programa de PolyScope.
El siguiente es un ejemplo de estructura del programa: