Conectarse con el sistema de visión y realizar una calibración mano-ojo
Para realizar una calibración mano-ojo, use el complemento Cognex In-Sight 2D Robot Guidance Esto establece el plano de trabajo dentro del campo de visión del sistema, lo que determina el área donde el robot puede manipular una pieza. El complemento crea un archivo de calibración (.CXD) que luego usted podrá importar a la tarea principal.
Comience la calibración definiendo tres puntos de ajuste que determinarán la altura y anchura del plano de trabajo.
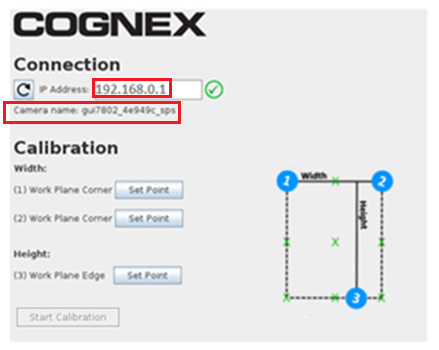
- En el menú principal de PolyScope, seleccione Programa > Robot > Instalación > Cognex. Se abrirá la ventana de Cognex.
-
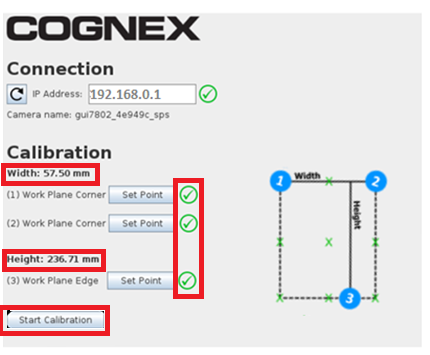
En Conexión, introduzca la dirección IP del sistema de visión. El nombre del sistema de visión mostrará debajo dicha dirección.
-
Si falla la conexión, consulte la siguiente información a la hora de resolver el problema:
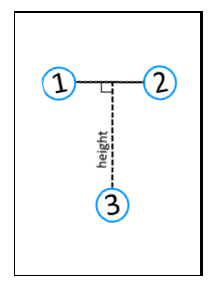
Si aparece este error: Haga lo siguiente: Asegúrese de que la cámara esté en línea y de que se haya cargado el archivo de tarea adecuado. En In-Sight Explorer, compruebe que la cámara esté en línea. El formato de la dirección IP no es válido (ejemplo de dirección: 192.168.0.1) En el software del robot, compruebe que se haya introducido la dirección IP correcta para esa cámara. Se ha agotado el tiempo de espera. Asegúrese de que el adaptador de red esté habilitado en Configurar red de robot. En el software del robot, compruebe que el robot esté en la red correcta. - Determine y tome nota visualmente del plano de trabajo que incluirá la parte que cogerá el robot. El siguiente gráfico ilustra los puntos de muestra de anchura y altura. Note: En los pasos 4 a 6 siguientes, antes de hacer clic en Aceptar, podrá verificar que el sistema de visión aún puede ver el PCH disparando una imagen manualmente en In-Sight EasyBuilder.
-
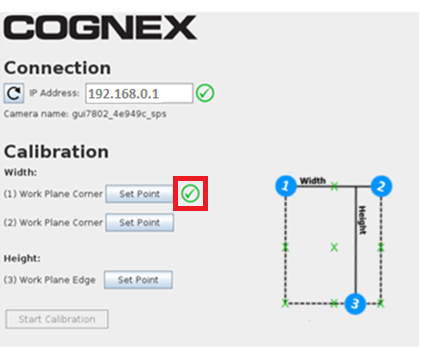
En primer lugar, usted definirá la anchura del plano de trabajo. Seleccione el botón Set Point (Punto de ajuste) para (1) Work Plane Corner (Esquina de plano de trabajo). Aparecerá la ficha Mover. Use los controles para mover el robot al primer punto de esquina del plano de trabajo y, luego, seleccione Aceptar. Aparecerá una marca de verificación verde junto al primer botón Punto de ajuste de la ventana Cognex.
-
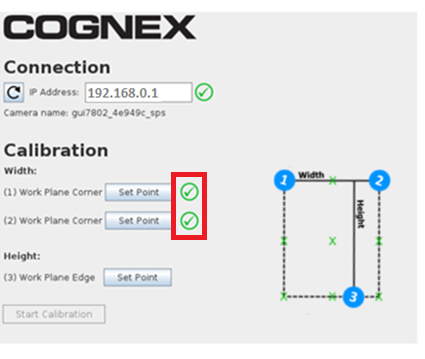
Seleccione el botón Set Point para (2) Work Plane Corner (Esquina de plano de trabajo). Volverá a aparecer la ficha Mover. Use los controles para mover el robot a la segunda esquina del plano de trabajo y, luego, seleccione Aceptar. Aparecerá una marca de verificación verde junto al segundo botón Set Point de la ventana Cognex.
-
A continuación, definirá la altura usando el tercer punto de ajuste. Seleccione el botón Set Point para (3) Work Plane Edge (Margen de plano de trabajo). Volverá a aparecer la ficha Mover. Use los controles para mover el robot de modo que quede en línea con el margen más alejado del plano de trabajo y, luego, seleccione Aceptar. Aparecerá una marca de verificación verde junto al tercer botón Set Point de la ventana Cognex. Se verán los valores de Anchura y Altura.
Aparecerá habilitado el botón Start Calibration (Iniciar calibración).
- Antes de comenzar la calibración, revise otra vez la anchura y altura para asegurarse de que sean satisfactorias.
- Para empezar la calibración, seleccione Start Calibration. Cuando termine la calibración, aparecerá el siguiente mensaje: Calibration has finished.
- Seleccione Start Program (Iniciar programa) o Continue (Continuar) para cerrar la ventana.
Durante la calibración, ocurre lo siguiente:
- El programa del robot dirige el robot a 15 puntos dentro del campo de visión y envía las coordenadas al sistema de visión.
- El sistema de visión adquiere una imagen y determina la ubicación del PCH.
- El programa del robot asigna las coordenadas PCH a las coordenadas de los píxeles del sistema de visión.
Cuando finaliza la calibración, el complemento Cognex In-Sight 2D Robot Guidance hace lo siguiente:
- Envía un mensaje a la herramienta del robot de la tarea de calibración que usted creó previamente.
- Crea un archivo de calibración con el nombre que usted introdujo en la tarea de calibración, junto con una extensión .CXD. Usted importará esta calibración a su tarea principal, que es donde también entrenará la pieza que tiene que recoger el robot.