Instalar el complemento Cognex In-Sight 2D Robot Guidance
- Vaya a cognex.com/urcaps y descárguese el archivo Cognex URCaps v1.3.0.urcap.
- Transfiera el archivo a una unidad USB.
-
Inicie el programa PolyScope. El menú principal mostrará:
- Inserte la unidad USB en el lado derecho de la consola portátil de Universal Robots.
-
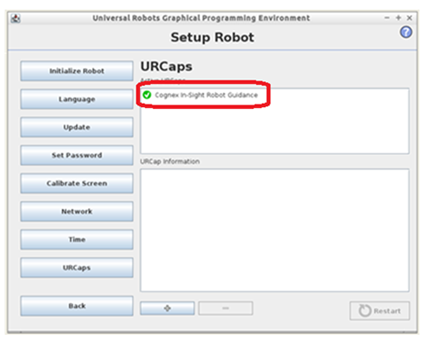
En el menú principal, seleccione Configurar robot > URCaps. Haga clic en el botón (+) para añadir el archivo del complemento URCap de Cognex, que se muestra como Cognex In-Sight Robot Guidance.
El complemento Cognex In-Sight 2D Robot Guidance añade lo siguiente al software PolyScope:
- Un elemento de menú Cognex en la ficha Programa (Programa > Estructura > URCaps > Cognex Camera Pose).
- Un elemento de menú Cognex en la ficha Instalación.
- Un nodo en el árbol del programa del robot llamado CGX_result:=CameraPose.
- Se ha añadirá una nueva variable llamada CGX_result a la ficha Programa > Comando. Esta variable sirve para almacenar la información sobre las poses que se envía desde el sistema de visión mientras se dispara.