Configurar el sistema de visión para la calibración
En este procedimiento, usted:
- Entrenará el patrón del PCH del robot para que pueda localizarse en el sistema de visión.
- Añadirá una herramienta del robot.
- Introducirá un nombre para el archivo de calibración .CXD, archivo que, una vez terminada la calibración, rellenará el complemento Cognex In-Sight 2D Robot Guidance con información de calibración.
- En EasyBuilder, conéctese al sistema de visión y cree una nueva tarea.
- Seleccione Configurar imagen. Asegúrese de que el punto central de herramienta (PCH) esté dentro del campo de visión del sistema.
-
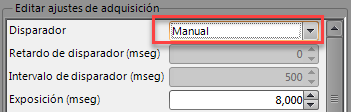
En Editar ajustes de adquisición, establezca el Disparador en Manual.
- Configure los ajustes de imagen para que la imagen quede bien enfocada e iluminada de manera uniforme.
- Seleccione Detectar pieza y agregue las herramientas que prefiera para localizar el PCH en la pinza del robot.
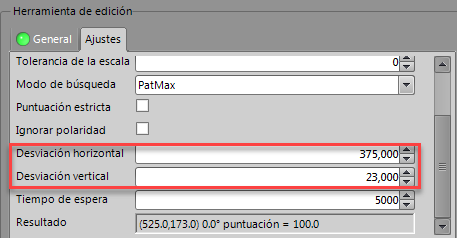
- Resalte la herramienta Patrón PatMax y seleccione Ajustes.
-
Use los parámetros Desviación horizontal y la Desviación vertical para ajustar la mirilla en la herramienta de forma que quede centrada en el PCH.
-
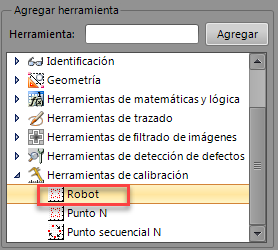
A continuación, para añadir la herramienta de calibración del robot, seleccione Inspeccionar pieza > Herramientas de calibración > Robot.
-
Seleccione Agregar.
Note: Esta herramienta también emplea características inteligentes, para que usted pueda usar otras características (cómo círculos) para vincular con la herramienta de calibración del robot. -
En la imagen, haga clic en la mirilla asociada a la herramienta que se use para definir el PCH; luego, haga clic en Aceptar. La herramienta del robot aparecerá en la ficha Resultados de la paleta y se conectará a la herramienta Patrón.
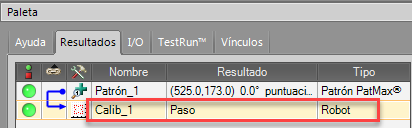
- Seleccione la herramienta Calibración de robot en la paleta de herramientas (llamada Calib_1 de forma predeterminada).
-
En la herramienta de edición, seleccione la ficha Ajustes
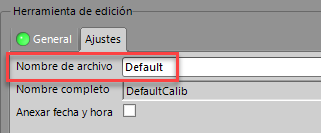
- En la herramienta de edición, seleccione la ficha Ajustes
- Introduzca un Nombre de archivo para el archivo de calibración .CXD. Si, opcionalmente, quiere incluir la fecha y hora actuales en el nombre del archivo, marque la casilla Anexar fecha y hora. El campo Nombre completo mostrará el nombre entero del archivo.
- Ponga en línea el sistema de visión. Este es necesario para que el sistema de visión se comunique con el robot.
- Guarde la tarea con un nombre que indique que se trata de una tarea de calibración. Puede reutilizar esta tarea si necesita volver a ejecutar la calibración en el complemento Cognex In-Sight 2D Robot Guidance.