Installation des Plug-Ins „Cognex In-Sight 2D Robot Guidance“
- Laden Sie unter cognex.com/urcaps die Datei Cognex URCaps v1.3.0.urcap herunter.
- Kopieren Sie die Datei auf einen USB-Stick.
- Öffnen Sie das PolyScope-Programm. Das Hauptmenü wird angezeigt:
- Schließen Sie den USB-Stick rechts an das Universal Robots Teach Pendant an.
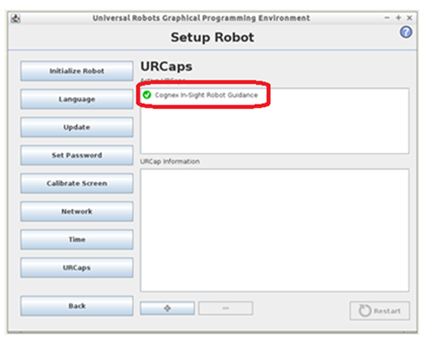
- Öffnen Sie im Hauptmenü Setup Robot > URCaps (Roboter einrichten > URCaps). Klicken Sie auf die Schaltfläche (+), um die URCap-Cognex-Plug-In-Datei hinzuzufügen. Diese Datei wird als Cognex In-Sight Robot Guidance (Cognex In-Sight-Roboterführung) angezeigt.
Mit dem Plug-In „Cognex In-Sight 2D Robot Guidance“ werden folgende Funktionen zu PolyScope hinzugefügt:
- Menüelement Cognex auf der Registerkarte „Programm“ (Program > Structure > URCaps > Cognex Camera Pose – Programm > Struktur > URCaps > Cognex-Kamerastellung).
- Menüelement Cognex auf der Registerkarte „Installation“.
- Knoten CGX_result:=CameraPose in der Baumstruktur für das Roboterprogramm.
- Neue Variable CGX_result auf der Registerkarte Program > Command (Programm > Befehl). Mit dieser Variablen werden die Stellungsdaten für das Vision-System, die während des Triggerns vom Vision-System gesendet werden, gespeichert.