라인 스캔 컨트롤
라인 스캔 컨트롤
라인 스캔 컨트롤로 In-Sight 5604 혹은 9902L 라인 스캔 비전 시스템의 설정을 구성할 수 있습니다. 라인 스캔 비전 시스템은 대상 물체가 아래로 지나갈 때 영상을 한 줄씩 조립합니다. 이렇게 함으로써, 원통형 물체의 "펴진"영상 또는 표면의 절단된 연속 영상을 전체적으로 구성할 수 있습니다. 라인 스캔 비전 시스템은 사용자 제공 인코더로 대상 속도의 가변성에도 불구하고 정확성이 높은 영상을 제공할 수 있습니다.
-
트리거: 라인 스캔 비전 시스템이 온라인일 때 영상 촬상 트리거의 소스를 정의합니다.
- 카메라(기본값): 비전 시스템의 촬상 트리거 전용 입력에서 감지된 상승 경계에서 영상 촬상을 활성화합니다.
- 계속: "실행 없이"(가능한 한 빠르게) 영상 촬상을 활성화합니다.
-
외부: 촬상 트리거로 구성된 개별 입력 비트에 적용된 시리얼 명령 또는 상승 경계에서 영상 촬상을 활성화합니다.
참고 :- 촬상 트리거로 구성된 일반 용도 입력 라인으로( AcquireImage 함수의 트리거 매개변수를 외부로 설정) 비전 시스템을 트리거하는 경우보다, 비전 시스템의 내장 촬상 트리거 입력( AcquireImage 함수의 트리거 매개변수를 카메라로 설정)을 사용할 경우 더 빠른 트리거 속도에 도달할 수 있습니다.
- AcquireImage 함수의 트리거 매개변수가 외부로 설정되어 있고 촬상이 누락된 경우의 오류: 촬상 분실 불연속 출력을 비전 시스템으로 보내지 않습니다. 오류: 촬상 분실 신호는 AcquireImage 함수의 트리거 매개변수가 카메라로 설정되어 있는 경우에만 지원됩니다.
- 수동: F5를 누르면 영상 촬상을 활성화합니다.
- 산업용 이더넷: 이더넷/IP, POWERLINK, PROFINET, SLMP 스캐너, CC-Link IE 필드 기본 등의 산업용 이더넷 프로토콜에서 트리거를 활성화합니다.
- 타임스탬프: PLC에서 이더넷/IP를 통해 비전 시스템으로 타임스탬프 트리거가 보내지면 이미지 촬상을 활성화합니다. 타임스탬프 옵션은 다음 비전 시스템에서만 지원됩니다.
128MB 비휘발성 플래시 메모리가 있고 4.5.0 이상 버전의 펌웨어를 운영 중인 In-Sight 5000 시리즈
참고 : In-Sight 5605 비전 시스템(하드웨어 유형 821-0032-1R), In-Sight 5705 비전 시스템, In-Sight 5705C 비전 시스템은 지원되지 않습니다.- In-Sight 7000 Gen2 시리즈 비전 시스템
- In-Sight 9000 시리즈 비전 시스템
-
라인 지체(라인 수): 영상 취득이 시작되기 전에 카메라 트리거가 발생한 후 지체될 라인의 수를 정의합니다.
참고 : 이 컨트롤을 활성화하려면 트리거 파라미터를 카메라로 설정해야 합니다. - 트리거 간격: 트리거 컨트롤이 계속으로 설정된 경우 촬상 간격을 밀리초(0 - 10,000; 기본값은 500) 단위로 정의합니다. 이 지연은 잡이 영상 처리를 완료하는 데 걸리는 시간에 따라 달라집니다. 예를 들어, 트리거 간격이 5,000밀리초로 설정된 경우 In-Sight 비전 시스템은 잡이 영상 처리를 5,000밀리초 이내에 완료한다는 전제 하에 5,000밀리초마다 영상을 촬상합니다. 그렇지 않은 경우에 In-Sight는 영상 처리가 완료되는 대로 영상을 촬상합니다.
-
노출(마이크로초): 노출 시간을 마이크로 초(0 - 1,000 µsec, 기본값은 8 µsec) 단위로 정의합니다. 비전 시스템이 트리거 신호를 받으면 조명이 지정된 기간 동안 라인 스캔 CCD 배열에 통합됩니다.
참고 :- 5604 시스템의 경우, 이 매개변수를 0으로 설정할 수 있지만 1.33µsec 미만의 값은 노출 값과 관계 없이 1.33µsec 동안 노출됩니다.
- 9902L 시스템의 경우, 이 매개변수를 0으로 설정할 수 있지만 2.00µsec 미만의 값은 노출 값과 관계 없이 2.00µsec 동안 노출됩니다.
- 라인 트리거 유형: 인코더 유형을: 소프트웨어 인코더 또는 하드웨어 인코더로 정의합니다. 이 컨트롤을 활성화하려면 In-Sight 5604 또는 9902L에 연결되어 있어야 합니다. 이 컨트롤은 라인 스캔 에뮬레이터에 대해 비활성화되어 있습니다.
- 하드웨어 인코더: 라인 트리거를 작동할 때 라인당 단계 수 설정 및 외부 하드웨어 인코더를 사용하도록 지정합니다. 하드웨어 인코더는 대상 물체가 특정 방향이나 거리로 이동할 때마다 신호 전환을 제공하여 대상 물체의 위치를 디지털화하는 장치입니다. In-Sight 5604 및 In-Sight 9902L은 두 가지 유형의 하드웨어 인코더를 지원합니다. 단일 또는 위상이라는 두 가지의 하드웨어 인코더를 지원합니다. 이는 라인 스캔 설정 대화상자에서 지정할 수 있습니다.
- 소프트웨어 인코더(기본값): 정해진 간격으로 라인 트리거를 작동할 때 Clock으로 사용하도록 라인 간격 설정을 지정합니다. 소프트웨어 인코더는 하드웨어 인코더의 소프트웨어 에뮬레이션이며 정해진 속도로 라인을 촬상합니다. 이 방법은 수직 영상 결과를 야기할 수 있는 대상 물체의 속도 변화(저주파 변속 및 고주파 진동)에 취약한 방법이므로 설정 및 문제 해결에 주로 사용됩니다.
- 라인 수: 라인 스캔 비전 시스템에서 영상을 구성할 때 취득하는 라인의 수를 지정합니다.
- 기본적으로 In-Sight 5604는 1024픽셀 x 2048픽셀 해상도로 표준 영역 이미지를 형성합니다. 너비는 조정할 수 없습니다. 최대 이미지 높이는 인코더 설정 버튼을 눌러 라인 스캔 설정 대화상자에서 지정할 수 있습니다. 라인 수 값은 1부터 최대 이미지 높이까지 선택할 수 있습니다.
- 기본적으로 In-Sight 9902L은 2048픽셀 x 4096픽셀 해상도로 표준 영역 이미지를 형성합니다. 너비와 최대 이미지 높이는 인코더 설정 버튼을 눌러 라인 스캔 설정 대화상자에서 지정할 수 있습니다. 1K 해상도(저조도 모드) 확인란 선택되면, 너비는 1024로 줄어들며 감광도가 높아집니다. 라인 수 값은 1부터 최대 이미지 높이까지 선택할 수 있습니다.
In-Sight 모델 최대 해상도 최소 최대 기본 설정 In-Sight 5604 1024 x 8192 1 8192 2048 In-Sight 9902L 2048 x 16384 1 16384 4096 1024 x 16384 참고 :- 회전 대상 물체의 영상을 취득하려는 경우 영상 트리거가 누락되지 않도록 하려면 라인 수 값은 두 개의 프레임 트리거 사이의 행 수보다 작아야 합니다.
- 이 매개변수는 1로 설정할 수 있으며 값이 8 미만일 경우 영상 취득을 성공적으로 할 수 없습니다.
-
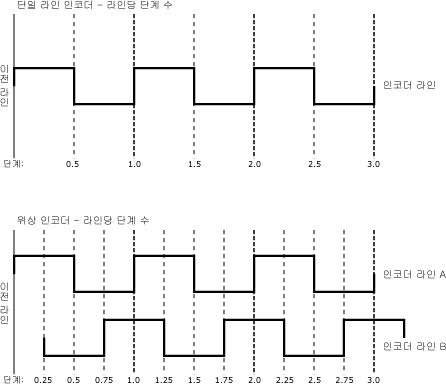
라인당 스텝: 라인 트리거 유형이 하드웨어 인코더로 설정된 경우, 영상 라인당 인코더 스텝 수를 정의합니다. "스텝"은 위상 인코더를 사용할 때 인코더 신호의 전체 주기입니다. 단일 라인 하드웨어 인코더는 두 개의 신호 전환과 동일하며 위상 하드웨어 인코더는 네 개의 신호 전환과 동일합니다.
In-Sight 모델 라인당 스텝 In-Sight 5604 0.250 - 256.000, 기본값 = 40.000 In-Sight 9902L 0.250 - 8191.000, 기본값 = 40.000 참고 :- 라인당 스텝 수 값은 단일 라인 하드웨어 인코더에 대해 0.5씩, 위상 하드웨어 인코더에 대해 0.25씩 증가해야 합니다.
- 5604의 경우, 라인 트리거 누락을 방지하려면 두 라인 사이의 가장 짧은 시간이 노출 설정(최소값은 1.33µsec)보다 21.47µsec 길도록 라인당 스텝 값을 설정해야 합니다.
- 9902L의 경우, 라인 트리거 누락을 방지하려면 두 라인 사이의 가장 짧은 시간이 노출 설정보다 3µsec 큰 값과 15µs 중 큰 값이 되도록 라인당 스텝 값을 설정해야 합니다.
-
라인 기간(마이크로초): 라인 트리거 유형이 하드웨어 인코더로 설정된 경우, 영상 라인당 인코더 스텝 수를 정의합니다.
In-Sight 모델 라인 간격 In-Sight 5604 21.000 - 1000000.000, 기본값 = 40.000 In-Sight 9902L 21.000 - 1000000.000, 기본값 = 40.000 In-Sight 에뮬레이터 10.000 - 1000000.000, 기본값 = 40.000 참고 :- 5604의 경우, 라인 트리거 누락을 방지하려면 두 라인 사이의 가장 짧은 시간이 노출 설정(최소값은 1.33µsec)보다 21.47µsec 길도록 라인 기간 값을 설정해야 합니다.
- 9902L의 경우, 라인 트리거 누락을 방지하려면 두 라인 사이의 가장 짧은 시간이 노출 설정보다 3µsec 큰 값과 15µs 중 큰 값이 되도록 라인 기간 값을 설정해야 합니다.
- 클립 모드: 영상 취득 트리거가 수신되는 경우 동작을 정의합니다. 하지만 지정한 라인의 수는 아직 취득되지 않았습니다.
- 클리핑 없음(기본값): 영상 트리거가 무시되도록 지정하면 "인식 오류" 이벤트가 발생합니다.
- 검은색으로 메우기: 나머지 라인을 검은색 픽셀로 채우도록 지정하면 새 영상이 즉시 시작됩니다. "촬상 오류" 이벤트는 발생하지 않습니다.
영상 라인 줄이기: 현재 영상이 현재 취득된 행의 수 크기로 줄어들도록 지정하면 새 영상이 즉시 시작됩니다.
참고 :- 검정색 채우기나 영상 라인 줄이기 선택 시:
- 영상을 제대로 클립하기 위해 트리거 유형을 카메라로 설정합니다. 다른 트리거 유형에서는 영상을 촬상 중일 때 트리거가 도착하면 현재 영상이 클립되지 않고 트리거가 누락됩니다.
- 영상을 촬상 중일 때 이벤트 설정 기본 모드 명령이 보내져 촬상이 트리거된 경우, 현재 영상이 클립되지 않고 트리거가 누락됩니다.
- 시간이 중요한 응용 프로그램의 경우 영상 라인 줄이기 옵션을 선택하십시오. 검정색 채우기 옵션을 사용할 경우 채우기를 몇백 라인 미만으로 유지하십시오.
- 5604의 경우, 검정색 채우기 옵션에서는 채우기 라인당 약 2µsec이 필요합니다(즉, 100라인당 0.2밀리초).
- 9902L의 경우, 검정색 채우기 옵션에서는 채우기 라인당 약 3µsec이 필요합니다(즉, 100라인당 0.3밀리초).
- 촬상 시간: 클립 모드 매개변수가 검정색 채우기 혹은 이미지 축소로 설정된 경우 이미지 촬상을 언제 종료할지 지정합니다. 이 옵션은 In-Sight 9902L 비전 시스템에서 트리거 유형이 카메라로 지정된 경우에만 지원됩니다.
- 0 = 다음 트리거(기본값): 영상 촬상이 트리거 펄스의 리딩 에지에서 시작하고 다음 트리거 신호가 시작될 때 종료됩니다.
- 1 = 트리거의 끝: 영상 촬상이 트리거 펄스의 리딩 에지에서 시작하고 트리거 신호의 트레일링 에지에서 종료됩니다. 다음의 경우에는 영상 촬상이 완료됩니다.
- 트리거 펄스의 트레일링 에지가 도착하지 않았어도, 지정된 라인 수가 획득된 경우.
지정된 라인 수가 획득되기 전에 펄스의 트레일링 에지가 도착하여 촬상이 종료된 경우.
참고 : 트리거의 끝을 선택하면, 지연 매개변수가 비활성화되며 촬상에 지연이 적용되지 않습니다.