Contrôles Balayage de ligne
Contrôles Balayage de ligne
Les contrôles Balayage de ligne permettent de configurer les paramètres de votre système de vision à balayage de ligne In-Sight 5604 ou 9902L. Le système de vision à balayage de ligne assemble une image ligne après ligne à mesure que l'objet cible passe sous le système. Cette technique permet de réaliser des images complètes, « à plat », d'objets cylindriques ou des coupes continues d'une surface. Grâce à un encodeur fourni par l'utilisateur, le système de vision à balayage de ligne permet d'obtenir des images de haute précision, malgré les variations de vitesse de la cible.
- Vous devez vous connecter à un système de vision In-Sight 5604 ou 9902L à balayage de ligne ou à un émulateur pour activer ces contrôles.
- Le niveau d'accès de l'utilisateur doit être réglé sur Complet pour pouvoir modifier ces réglages.
- Le système de vision à balayage de ligne doit être Hors ligne.
-
Déclencheur : Définit la source du déclencheur d'acquisition d'image lorsque le système de vision à balayage de ligne est En ligne.
- Caméra (par défaut) : Permet d'acquérir les images sur un front montant capté au niveau de l'entrée de déclenchement d'acquisition dédiée du système de vision.
- Continue : Permet d'acquérir les images aussi rapidement que possible.
-
Externe : Permet d'acquérir les images au moyen d'une commande série ou sur le front montant appliqué à un bit d'entrée discrète configuré en tant que déclencheur d'acquisition.
Remarque :- Il est possible d'obtenir des fréquences de déclenchement plus rapides en utilisant l'entrée intégrée du déclencheur d'acquisition du système de vision (en définissant le paramètre Déclencheur de la fonction AcquireImage sur Caméra) plutôt que de déclencher les événements du système de vision avec une ligne d'entrée générale configurée en tant que Déclencheur d'acquisition (en définissant le paramètre Déclencheur de la fonction AcquireImage sur Externe).
- Si le paramètre Déclencheur de la fonction AcquireImage est défini sur Externe et qu'une acquisition échoue, la sortie ERR : Échec de l'acquisition n'est pas émise du système de vision. Le signal ERR : Acquisition manquée est uniquement pris en charge lorsque le paramètre Déclencheur de la fonction AcquireImage est défini sur Caméra.
- Manuel : Permet d'acquérir une image en appuyant sur la touche F5.
- Ethernet industriel : Permet le déclenchement à partir d'un protocole Ethernet industriel, comme EtherNet/IP, POWERLINK, Profinet, SLMP Scanner ou CC-Link IE Field Basic.
- Horodatage : Permet d'acquérir une image lorsqu'un déclencheur temporel est envoyé au système de vision par Ethernet/IP depuis un PLC. L'option Horodatage n'est disponible que sur les systèmes de vision suivants :
Systèmes de vision In-Sight série 5000 avec 128 Mo de mémoire Flash non volatile fonctionnant avec la version 4.5.0 ou ultérieure du micrologiciel
Remarque : Les systèmes de vision In-Sight 5605 (type 821-0032-1R), In-Sight 5705 et In-Sight 5705C ne sont pas pris en charge.- Systèmes de vision In-Sight série 7000 Gen2
- Systèmes de vision In-Sight série 9000
-
Retard de ligne (lignes) : Définit le nombre de lignes d'attente d'acquisition d'image, une fois que le déclenchement d'une caméra a eu lieu.
Remarque : Le paramètre Déclencheur doit être réglé sur Caméra pour activer ce contrôle. - Intervalle de déclenchement : Permet de définir un intervalle en millisecondes entre les acquisitions lorsque le contrôle Déclencheur est défini sur Continue (0 à 10 000, 500 par défaut). Ce délai dépend de la durée de traitement de l'image requise par le projet. Par exemple, si l'intervalle de déclenchement est défini sur 5 000 millisecondes, le système de vision In-Sight fait l'acquisition d'une image toutes les 5 000 millisecondes, sous réserve que le projet ait fini de traiter l'image dans ces 5 000 millisecondes. Sinon, le système de vision In-Sight procède à l'acquisition d'une image dès que la précédente a été traitée.
-
Exposition (µs) : Définit le temps d'exposition, en microsecondes (0 à 1 000 µs ; 8 µs par défaut). Lorsque le système de vision reçoit un signal de déclenchement, le capteur CCD de balayage de ligne est exposé à la lumière pendant la durée spécifiée.
Remarque :- Sur le modèle 5604, bien que ce paramètre puisse être défini sur 0, toute valeur inférieure à 1,33 µs entraînera une exposition effective de 1,33 µs, quelle que soit la valeur de la propriété Exposition.
- Sur le modèle 9902L, bien que ce paramètre puisse être défini sur 0, toute valeur inférieure à 2,00 µs entraînera une exposition effective de 2,00 µs, quelle que soit la valeur de la propriété Exposition.
- Type de déclencheur de ligne : Définit le type d'encodeur : Encodeur logiciel ou Encodeur matériel. Vous devez vous connecter à un système de vision In-Sight 5604 ou 9902L pour activer ce contrôle. Ce contrôle est désactivé pour les émulateurs à balayage de ligne.
- Encodeur matériel : Indique que le paramètre Étapes par ligne et un encodeur matériel externe serviront à piloter les déclenchements de ligne. Un Encodeur matériel est un appareil qui numérise la position de l'objet cible en émettant un signal de transition à chaque déplacement de la cible dans une direction spécifique ou d'une distance spécifique. Les systèmes In-Sight 5604 et In-Sight 9902L prennent en charge deux types différents d'encodeurs matériels : Simple ou Quadrature. Ce réglage peut être défini dans la boîte de dialogue Paramètres de balayage des lignes.
- Encodeur logiciel (par défaut) : Indique que le paramètre Période de ligne servira d'horloge de synchronisation pour piloter les déclenchements de ligne. Un Encodeur logiciel est l'émulation logicielle d'un encodeur matériel et permet l'acquisition de lignes à la fréquence définie. Cette méthode est principalement utilisée pour les opérations d'installation et de dépannage, car elle est sensible aux variations de vitesse de la cible (accélération à basse fréquence et tremblement à haute fréquence). Ces situations peuvent entraîner des artéfacts dans le sens vertical.
- Nombre de lignes : Définit le nombre de lignes acquises pour que le système de vision à balayage de ligne construise une image.
- Par défaut, le système In-Sight 5604 construit des zones d'image standard d'une résolution de 1024 x 2048. Il n'est pas possible de modifier la largeur. Il est possible de modifier la hauteur maximale de l'image en appuyant sur le bouton Configuration de l'encodeur afin d'ouvrir la boîte de dialogue Paramètres de balayage des lignes. La plage de valeurs Nombre de lignes est compris entre 1 et la Hauteur maximale d'image.
- Par défaut, le système In-Sight 9902L construit des zones d'image standard d'une résolution de 2048 x 4096. Il est possible de modifier la hauteur et la largeur maximales de l'image en appuyant sur le bouton Configuration de l'encodeur afin d'ouvrir la boîte de dialogue Paramètres de balayage des lignes. Lorsque la case Résolution 1K (Mode d'éclairage bas) est activée, la largeur est réduite à 1024 pour une plus grande sensibilité à la lumière. La plage de valeurs Nombre de lignes est compris entre 1 et la Hauteur maximale d'image.
Modèle In-Sight Résolution maximale Minimum Maximum Valeur par défaut In-Sight 5604 1024 x 8192 1 8192 2048 In-Sight 9902L 2048 x 16384 1 16384 4096 1024 x 16384 Remarque :- Pour l'acquisition d'images à partir de cibles en rotation, la valeur Nombre de lignes doit être inférieure au nombre de lignes entre deux déclenchements de trame pour éviter les pertes d'image.
- Bien que ce paramètre puisse être défini sur 1, toute valeur inférieure à 8 entraînera l'échec de l'acquisition d'image.
-
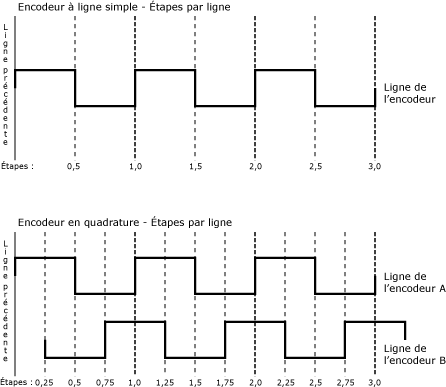
Étapes par ligne : Lorsque Type de déclencheur de ligne est défini sur Encodeur matériel, ce paramètre définit le nombre d'étapes d'encodeur par ligne de l'image. Une "étape" est un cycle complet du signal de l'encodeur (ou des signaux dans le cas d'un encodeur matériel en quadrature). Pour un encodeur matériel à ligne simple, cela équivaut à deux transitions de signaux, et pour un encodeur matériel en quadrature à quatre transitions de signaux.
Modèle In-Sight Étapes par ligne In-Sight 5604 0.250 à 256.000 ; par défaut = 40.000 In-Sight 9902L 0.250 à 8191.000 ; par défaut = 40.000 Remarque :- La valeur Étapes par ligne doit être incrémentée de 0.5 pour un encodeur matériel à ligne simple et de 0.25 pour un encodeur matériel en quadrature.
- Sur le système 5604, pour éviter la perte de déclencheurs de ligne, la valeur Étapes par ligne doit être définie de façon à ce que l'intervalle de temps le plus court entre deux lignes soit supérieur de 21,47 µs à la valeur de l'Exposition (minimum 1,33 µs).
- Sur le système 9902L, pour éviter la perte de déclencheurs de ligne, la valeur Étapes par ligne doit être définie de façon à ce que l'intervalle de temps le plus court entre deux lignes soit supérieur de 3 µs à la valeur de l'Exposition ou égal à 15 µs, selon la valeur la plus élevée.
-
Période de ligne (µs) : Lorsque Type de déclencheur de ligne est défini sur Encodeur logiciel, ce paramètre définit la durée, en microsecondes, par ligne de l'image.
Modèle In-Sight Période de ligne In-Sight 5604 21.000 à 1000000.000 ; par défaut = 40.000 In-Sight 9902L 21.000 à 1000000.000 ; par défaut = 40.000 Émulateur In-Sight 10.000 à 1000000.000 ; par défaut = 40.000 Remarque :- Sur le système 5604, pour éviter la perte de déclencheurs de ligne, la valeur Période de ligne doit être définie de façon à ce que l'intervalle de temps le plus court entre deux lignes soit supérieur de 21,47 µs à la valeur de l'Exposition (minimum 1,33 µs).
- Sur le système 9902L, pour éviter la perte de déclencheurs de ligne, la valeur Période de ligne doit être définie de façon à ce que l'intervalle de temps le plus court entre deux lignes soit supérieur de 3 µs à la valeur de l'Exposition ou égal à 15 µs, selon la valeur la plus élevée.
- Mode de coupure : Permet de définir une action consécutive à la réception d'un déclencheur d'acquisition d'image alors que le nombre de lignes défini n'a pas encore été acquis.
- Pas de coupure (par défaut) : Indique que le déclencheur d'image sera ignoré et qu'un événement "Erreur d'acquisition" sera généré.
- Remplir les lignes manquantes en noir : Indique que les lignes restantes seront remplies par des pixels noirs et que l'acquisition de la nouvelle image débutera immédiatement. Aucun événement "Erreur d'acquisition" n'est alors généré.
Image partielle : Indique que l'image actuelle sera réduite aux dimensions du nombre de lignes déjà acquises, et que l'acquisition de la nouvelle image débutera immédiatement.
Remarque :- Si vous avez sélectionné Remplir en noir ou Réduire les lignes d'image :
- Définissez le Type de déclenchement sur Caméra pour couper correctement les images. Avec tout autre Type de déclenchement, si le déclenchement se produit alors qu'une image est en cours d'acquisition, celle-ci n’est pas coupée et le déclenchement est ignoré.
- Si une commande en mode natif Set Event est envoyée pour déclencher une acquisition et que le déclenchement se produit alors qu'une image est en cours d'acquisition, celle-ci n’est pas coupée et le déclenchement est ignoré.
- Pour des applications en temps réel, sélectionnez l'option Réduire les lignes d'image. Ou, si vous utilisez l'option Remplir en noir, ne configurez qu'une centaine de lignes.
- Pour le système 5604, l'option Remplir en noir termine une ligne en environ 2 µs (c'est-à-dire 0,2 milliseconde pour 100 lignes).
- Pour le système 9902L, l'option Remplir en noir termine une ligne en environ 3 µs (c'est-à-dire 0,3 milliseconde pour 100 lignes).
- Durée d'acquisition : Indique quand arrêter l'acquisition d'image lorsque le paramètre Mode de coupure est réglé sur Remplir en noir ou Réduire les lignes d'image. Pour le système de vision In-Sight 9902L, cette option est prise en charge uniquement lorsque le Type de déclenchement sélectionné est Caméra.
- 0 = Déclencheur suivant (par défaut) : L'acquisition de l'image commence sur le front montant de l'impulsion de déclenchement et se termine au début du signal de déclenchement suivant.
- 1 = Fin du Déclencheur : L'acquisition de l'image commence sur le front montant de l'impulsion de déclenchement et se termine au front descendant de cette même impulsion. Deux facteurs déterminent si l'acquisition d'une image est terminée :
- Le nombre de lignes spécifié a été acquis, même si le front descendant de l'impulsion de déclenchement n'est pas encore atteint.
Le front descendant de l'impulsion survient et arrête l'acquisition avant que le nombre de lignes acquises corresponde au Nombre de lignes.
Remarque : Si Fin du Déclencheur est sélectionné, le paramètre Délai est désactivé et aucun délai n'est appliqué à l'acquisition.