Einlernen des Tool Center Points (TCP) des Roboters
Der Tool Center Point (TCP, „Werkzeugmittelpunkt“) ist der Teil des Roboters, der mit dem Werkteil in Berührung kommt. Der TCP muss eingelernt werden, damit der Roboter sich aus verschiedenen Winkeln („Wegpunkten“) in die gleiche Position bringen kann.
Der TCP muss sich im Sichtfeld des Vision-Systems befinden.
Hinweis: Dieses Verfahren läuft im Rahmen von PolyScope ab und wurde der Bequemlichkeit halber in dieses Dokument aufgenommen.
- Öffnen Sie PolyScope.
- Öffnen Sie im Hauptmenü Program Robot (Roboter programmieren). Das Fenster „New Program“ (Neues Programm) wird geöffnet.
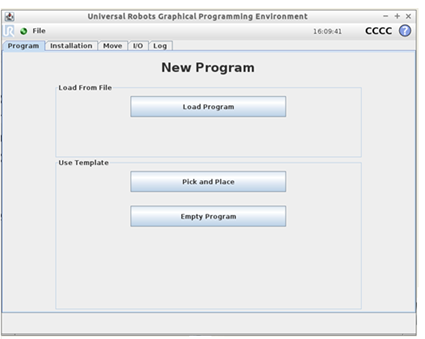
- Klicken Sie auf Pick and Place (Greifen und positionieren).
- Klicken Sie auf Installation > TCP Configuration (Installation > TCP-Konfiguration).
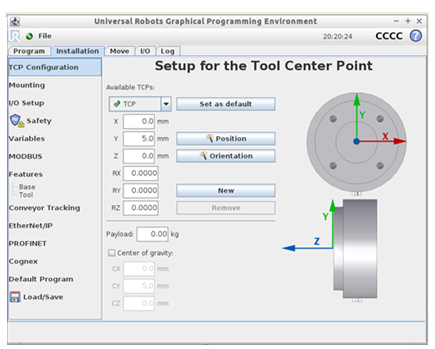
- Zum Einlernen des TCP können Sie ihn auf verschiedene Arten manuell messen:
- Wenn sich der TCP direkt auf der Z-Achse befindet: Messen Sie den Abstand zwischen dem TCP und dem Mittelpunkt des Werkzeugflanschs (in Millimetern) für die Z-Achse. Geben Sie die Abmessung in das Feld Z ein.
- Wenn sich der TCP NICHT direkt auf der Z-Achse befindet: Messen Sie den Abstand zwischen dem TCP und dem Mittelpunkt des Werkzeugflanschs (in Millimetern) für die X-, die Y- und die Z-Achse. Geben Sie die Abmessung in das Feld X, Y bzw. Z ein.
Weitere Informationen können Sie dem PolyScope-Handbuch entnehmen. Sie können dieses Handbuch auf der Website von Universal Robots herunterladen.