Programmierung des Universal Robots-Roboters
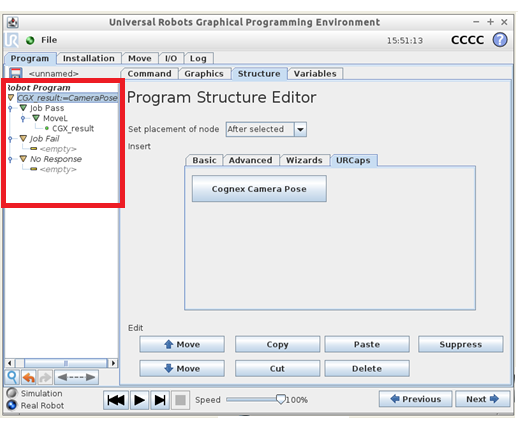
Nachdem Sie die Roboterkalibrierung und den In-Sight-Job eingerichtet haben, können Sie den Roboter für die Bestückungsanwendung mit MoveL und anderen Roboterbefehlen programmieren. Sie können auch die entsprechenden Aktionen programmieren, wenn ein Job besteht, fehlschlägt oder keine Antwort vom Vision-System eingeht. Das Plug-In „Cognex In-Sight 2D Robot Guidance“ stellt für den Anfang folgende Optionen bereit:
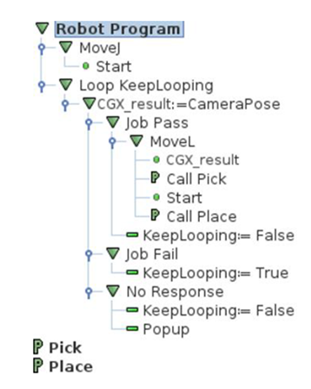
Nach dem Abschluss der Programmierung und dem Ausführen der Anwendung geschieht Folgendes, wenn das Programm den Knoten CGX_result:=CameraPose erreicht:
- Der Roboter ruft die Position des trainierten Teils von der Kamera ab.
- Das Vision-System triggert und gibt die Stellung zurück, die der Position des Teils entspricht.
- Die Stellung wird in der Variable CGX_result im Programm-Struktur-Editor in PolyScope gespeichert.
Ein Beispiel für eine Programmstruktur: