Point Cloud
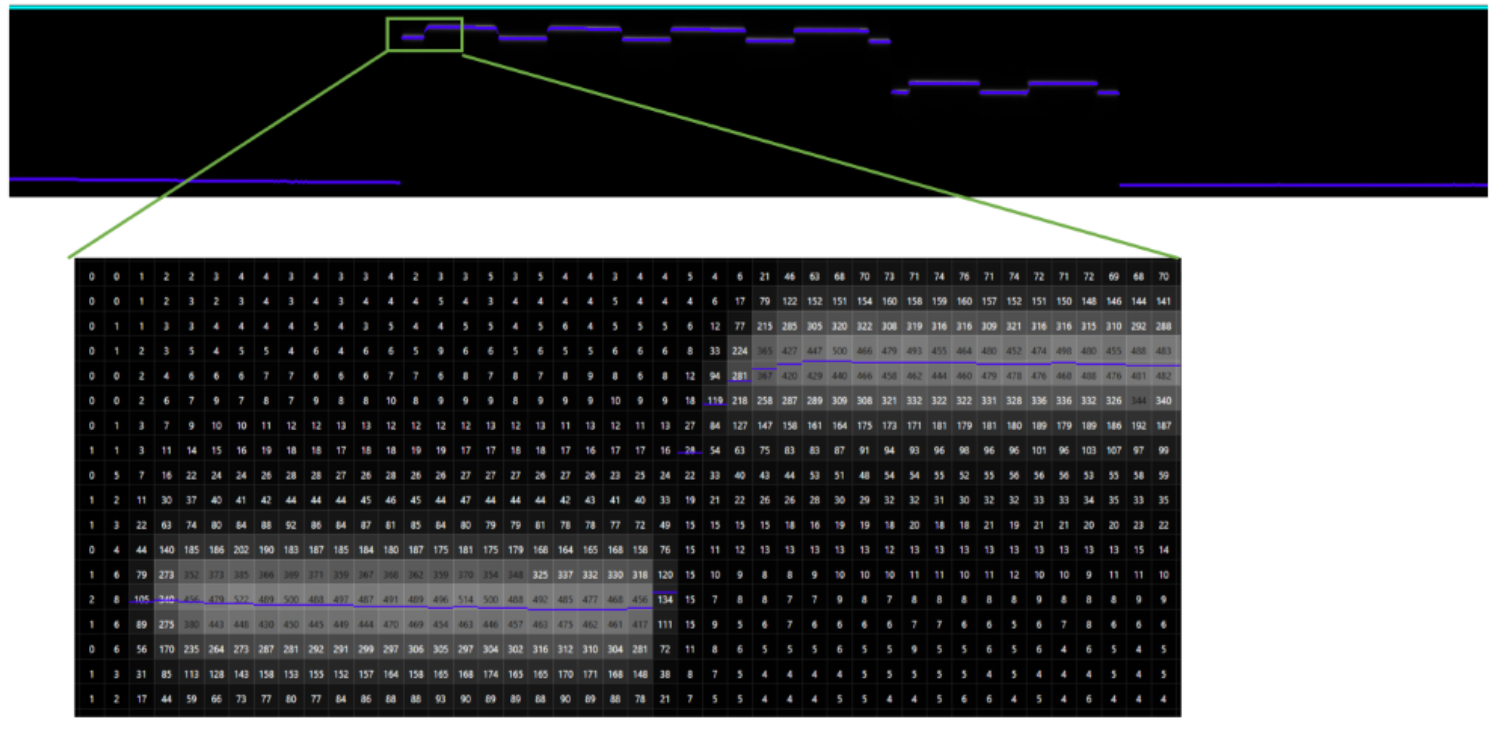
A point cloud is generated from a series of uncalibrated peak data. For example, the image below shows a raw 2D image from a single intensity scan.

Each pixel value in the raw 2D image is mapped to a height value based on its intensity value, as seen on the image below.
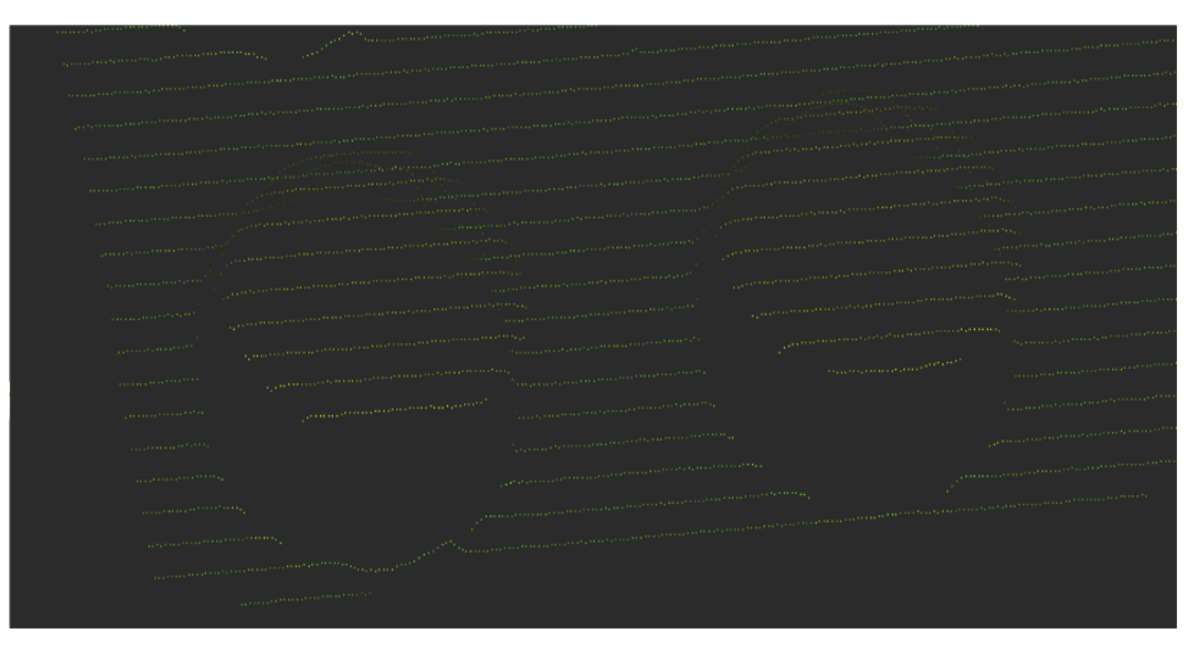
Factory calibration transforms the uncalibrated peak data into real-world coordinates and removes distortions such as camera lens and perspective. This creates a profile which represents the physical contours of the object. The image below shows a series of profiles.
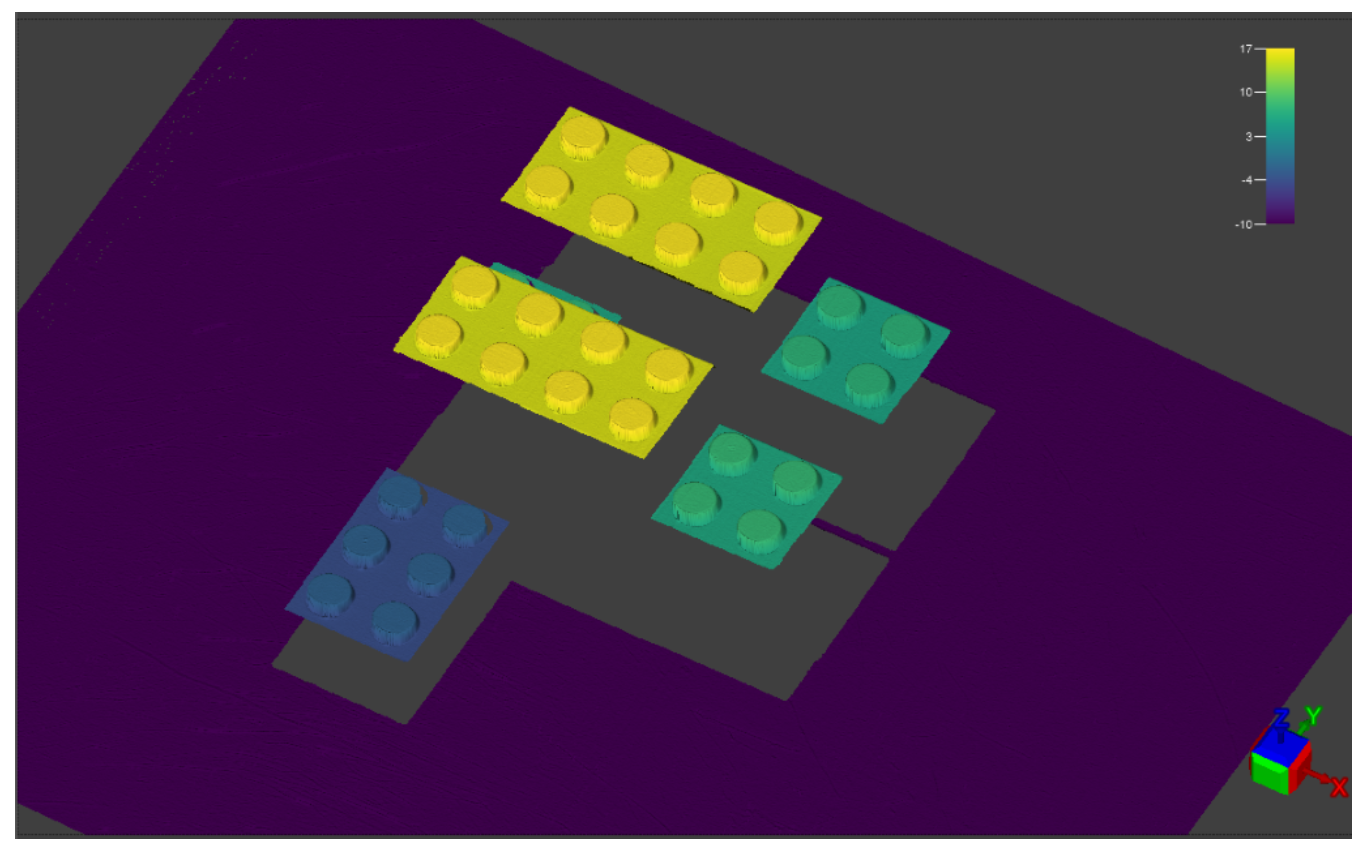
These profiles are assembled to create an image of the whole object. This is called a point cloud. The image below shows an example.