Point Cloud Acquisition with 3D-L4000 Series Vision Systems
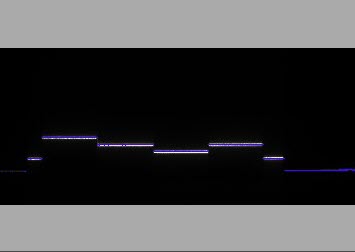
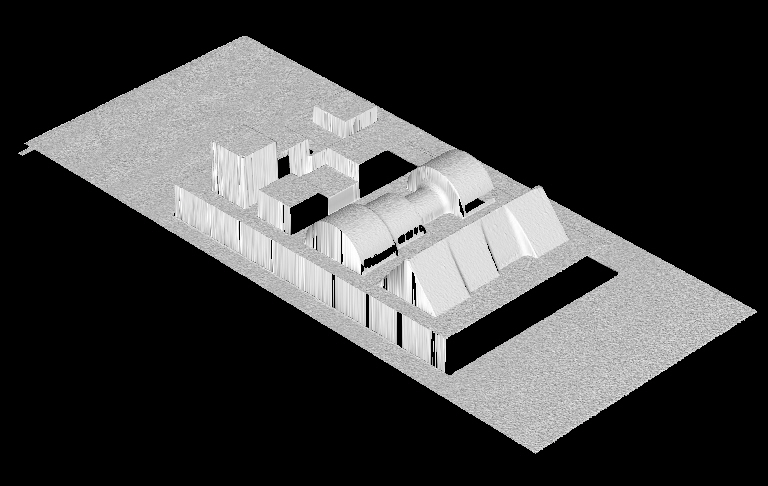
3D-L4000 series vision systems use a speckle-free laser line generator coupled with an image sensor for measuring objects. During acquisition, the device accumulates several 2D profiles one after the other by triangulating object surfaces with the image sensor and the laser line. This is achieved by acquiring a set of raw 2D gray-scale images (with the overlay of the detected laser line on top) that are used for creating metric-calibrated 2D profiles. These 2D profiles are then used to construct a final 3D point cloud.
|
|
| A raw acquisition showing the 2D profile of the acquired object. | The resulting 3D point cloud constructed from the 2D profiles. |
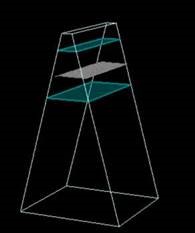
The device acquires image data in a working space with an extruded trapezoid shape. In the below example, the detection area is located between the two blue surfaces (while the acquired surface is displayed in gray):
|
|
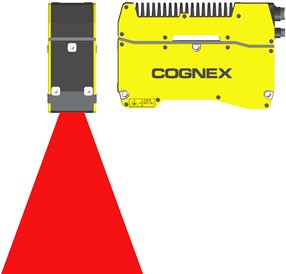
| The working space of the 3D-L4000 sensor illustrated in a 3D space | The laser as cast from the 3D-L4000 series sensor |
Following physical deployment, the acquisition is configured with its acquisition wizard in In-Sight 3D.