SortBlobs
La función SortBlobs [ClasificarBlobs] se utiliza para clasificar las manchas (blobs) referenciadas en una estructura de datos de Blobs en relación con un elemento posicionador.
SortBlobs Descripción general
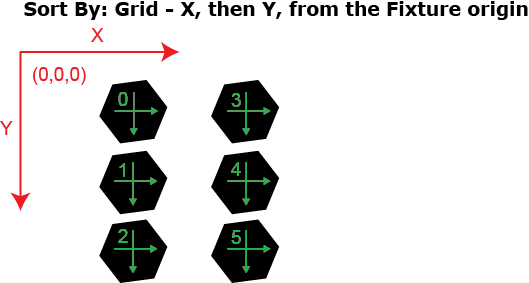
Al calcular la posición del centro de masas (centroide) de la mancha referenciada en el sistema de coordenadas del elemento posicionador especificado, la función SortBlobs clasifica las manchas referenciadas en función de una de sus características medibles, como la distancia X o Y de la mancha con respecto al origen de un elemento posicionador o de una cuadrícula, o el ángulo o la distancia angular de la mancha.
Se examina cada mancha referenciada de la estructura de datos Blobs, se identifican las manchas en función de la configuración del parámetro Clasificar por y se determinan sus posiciones midiendo la distancia o posición angular de la mancha con respecto a un punto fijo.
Una vez la función SortBlobs ha clasificado las manchas referenciadas, se insertarán automáticamente una nueva estructura de datos de Blobs y la correspondiente tabla de resultados en la hoja de cálculo. En la tabla de resultados, las manchas se presentan por orden descendente de proximidad al elemento posicionador elegido (es decir, la mancha más próxima al elemento posicionador es la que se presenta primero, la siguiente mancha más cercana, en segundo lugar, etc.).
SortBlobs es una función extremadamente útil en los casos en los que hay múltiples manchas y se requiere determinar la posición de las manchas con respecto a las demás.
SortBlobs Entradas
| Parámetro | Descripción | ||||||||||||||||||
|
Blobs |
Este parámetro utiliza Referencias de celda que hacen referencia a la celda de la hoja de cálculo que contiene la estructura de datos de Blobs a clasificar u ordenar. |
||||||||||||||||||
|
Número a clasificar |
Especifica el número máximo de manchas (de 1 a 4096; por defecto = 3) que podrá devolver como resultado la función. Nota: Si el valor de este parámetro es mayor que cero, la función SortBlobs insertará automáticamente una tabla de resultados que presentará como máximo las 10 entradas que corresponden a las 10 primeras manchas contenidas en la estructura de datos de Blobs. Si desea que se visualicen más entradas, puede ampliar la tabla copiando la última fila y pegando adicionalmente la fila tantas veces como desee al final de la table; asegúrese de incrementar el número de índice de la(s) fila(s) recién pegada(s) para que se indexen adecuadamente las manchas.
|
||||||||||||||||||
|
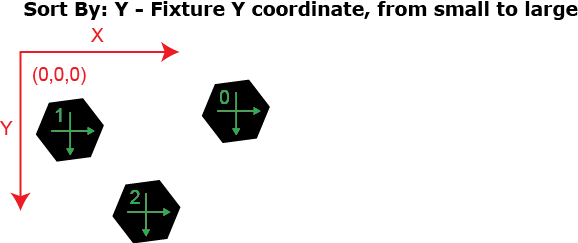
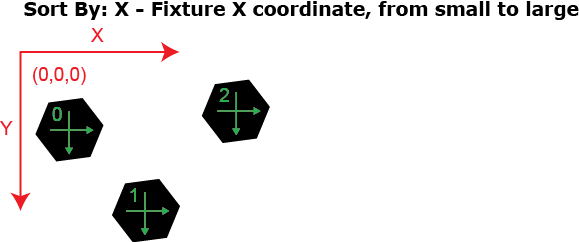
Clasificar por |
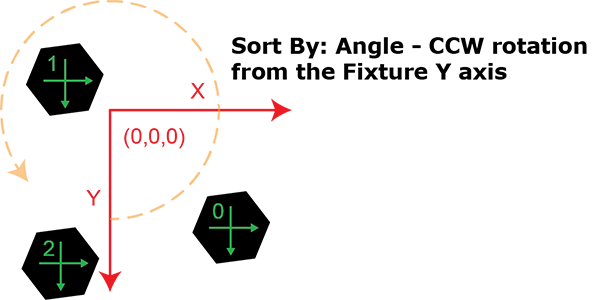
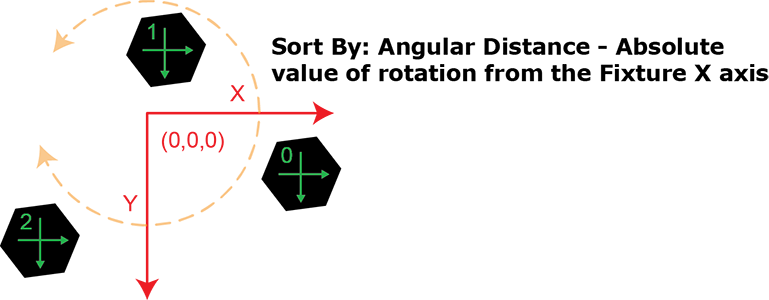
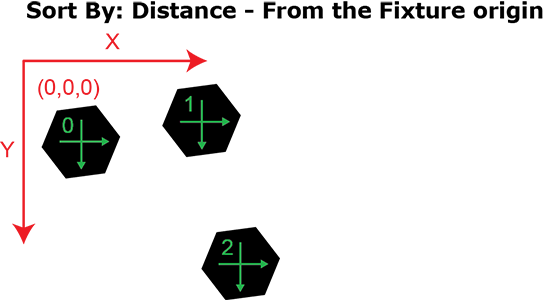
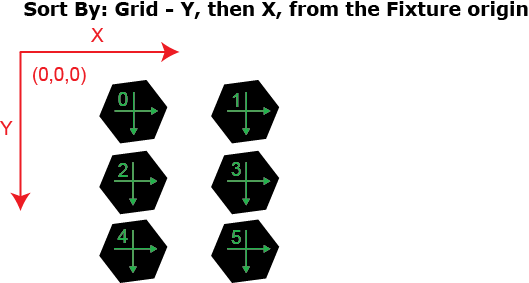
Especifica cómo se medirán y clasificarán las manchas referenciadas.
|
||||||||||||||||||
|
Elemento posicionador |
Define el centro de masas (centroide) de la mancha referenciada con respecto al Fixture [Elemento posicionador] de entrada o en el sistema de coordenadas de la imagen de salida proporcionada por una herramienta del conjunto Vision Tools. Si se establece que el centro de masas de la mancha se define en relación con elemento posicionador, se asegura que cualquier desplazamiento o rotación del elemento posicionador implicará el correspondiente desplazamiento o rotación de la mancha con respecto al elemento posicionador. El valor de configuración predeterminado es (0,0,0), la esquina superior izquierda de la imagen.
|
||||||||||||||||||
|
Mostrar |
Especifica el modo de visualización de las superposiciones gráficas de SortBlobs sobre la imagen.
|
SortBlobs Salidas
|
Devuelve |
Una estructura de datos de Blobs que contiene las manchas ordenadas según clasificación o #ERR si alguno de los parámetros de entrada no es válido. |
||||||||||||||||||||||||||||||||||||
|
Resultados |
Cuando se inserta inicialmente SortBlobs en una celda, se crea una tabla de resultados en la hoja de cálculo. Nota: Si el valor del parámetro Número a clasificares mayor que cero, la función SortBlobs insertará automáticamente una tabla de resultados que presentará como máximo las 10 entradas que corresponden a las 10 primeras manchas contenidas en la estructura de datos de Blobs. Si desea que se visualicen más entradas, puede ampliar la tabla copiando la última fila y pegando adicionalmente la fila tantas veces como desee al final de la table; asegúrese de incrementar el número de índice de la(s) fila(s) recién pegada(s) para que se indexen adecuadamente las manchas.
Las siguientes funciones Blobs Funciones de Vision Data Access se insertan automáticamente en la hoja de cálculo para crear una tabla de resultados basada en la estructura de datos de SortBlobs:
|