SortBlobs
SortBlobs는 Blobs 데이터 구조에서 참조된 미확인 개체를 Fixture와의 관계에서 정렬하는 데 사용됩니다.
SortBlobs 개요
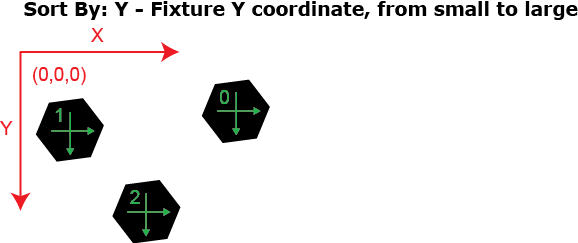
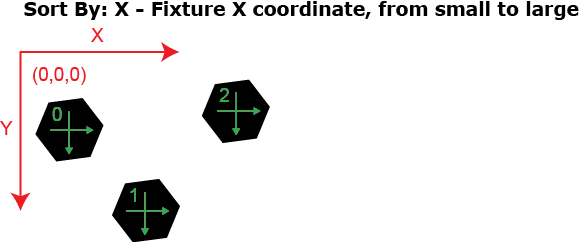
SortBlobs는 지정된 이미지 Fixture 좌표계를 기준으로 참조된 미확인 개체의 무게 중심 위치를 계산하고 측정 특성(Fixture의 원점 또는 격자로부터의 x 축 또는 y 축에 따른 거리, 미확인 개체의 각도 또는 각 거리 등) 중 한 가지에 따라 참조된 미확인 개체들을 정렬합니다.
참조된 Blobs 데이터 구조의 각 미확인 개체를 검사하고 정렬 기준 매개 변수 설정에 따라 각 미확인 개체를 식별하고 미확인 개체의 거리 또는 고정 위치에 대한 각도 관계를 측정하여 미확인 개체의 위치를 계산합니다.
SortBlobs 함수에 의해 참조된 미확인 개체들이 정렬되면 새 Blobs 데이터 구조와 그에 따른 결과표가 스프레드시트에 자동으로 삽입됩니다. 결과표는 미확인 개체들이 선택된 Fixture와의 거리에 따라 내림차순으로 정렬됩니다(가장 가까운 미확인 개체가 처음).
SortBlobs는 미확인 개체가 다수 있을 대 각 미확인 개체의 위치를 다른 미확인 개체와의 관계에서 파악해야 할 때 매우 유용합니다.
SortBlobs 입력
| 매개 변수 | 설명 | ||||||||||||||||||
|
미확인 개체 |
이 매개 변수는 정렬할 Blobs 데이터 구조를 포함하는 스프레드시트 셀을 셀 참조합니다. |
||||||||||||||||||
|
정렬할 개수 |
반환할 최대 미확인 개체 수(1 - 4096, 기본값 = 3)를 지정합니다. 참고: 이 매개 변수값이 0보다 큰 경우 SortBlobs는 Blobs 데이터 구조의 처음 10개의 미확인 개체에 해당하는 최대 10개의 항목이 포함된 결과표를 자동으로 삽입합니다. 더 많은 항목을 표시하려면 표의 마지막 행을 복사하고 표의 끝에 붙여넣기하여 확장할 수 있습니다. 적절한 미확인 개체가 인덱싱될 수 있도록 새로 붙여넣은 행의 인덱스 수를 증가해야 합니다.
|
||||||||||||||||||
|
정렬 기준 |
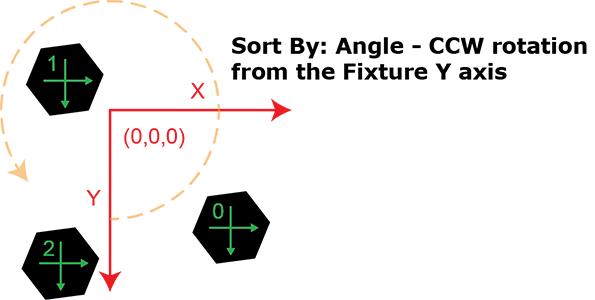
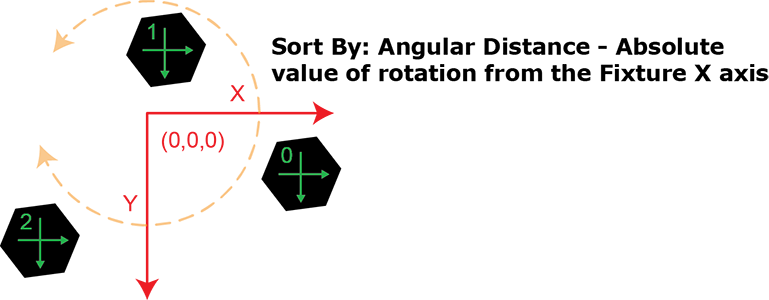
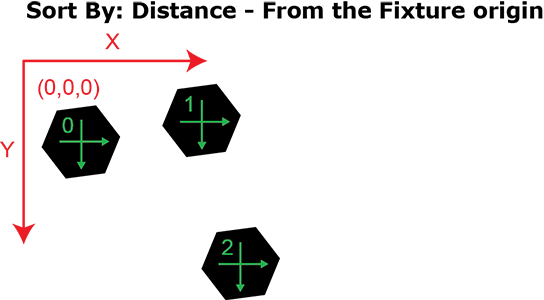
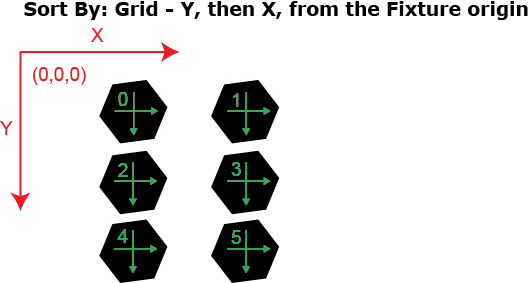
참조된 미확인 개체들을 측정하고 정렬하는 방법을 지정합니다.
|
||||||||||||||||||
|
Fixture |
Fixture 입력 또는 비전 도구 함수의 이미지 좌표 시스템의 출력을 기준으로 참조된 미확인 개체의 질량 중심을 정의합니다. 참조된 미확인 개체의 무게 중심을 Fixture 기준으로 설정하면 Fixture가 회전하거나 변환된 경우에도 참조된 미확인 개체가 Fixture 기준으로 회전하거나 변환됩니다. 기본 설정은 이미지의 왼쪽 상단 모서리인 (0, 0, 0)입니다.
|
||||||||||||||||||
|
표시 |
이미지에서 SortBlobs 그래픽 오버레이를 표시하는 모드를 지정합니다.
|

SortBlobs 출력
|
반환 |
정렬된 미확인 개체들을 포함하는 Blobs 데이터 구조. 입력 매개 변수가 유효하지 않은 경우 #ERR. |
||||||||||||||||||||||||||||||||||||
|
결과 |
SortBlobs가 처음으로 셀에 삽입되면 스프레드시트에 결과표가 만들어집니다. 참고: 정렬할 개수 매개 변수값이 0보다 큰 경우 SortBlobs는 Blobs 데이터 구조의 처음 10개의 미확인 개체에 해당하는 최대 10개의 항목이 포함된 결과표를 자동으로 삽입합니다. 더 많은 항목을 표시하려면 표의 마지막 행을 복사하고 표의 끝에 붙여넣기하여 확장할 수 있습니다. 적절한 미확인 개체가 인덱싱될 수 있도록 새로 붙여넣은 행의 인덱스 수를 증가해야 합니다.
다음 미확인 개체 비전 데이터 액세스 함수가 자동으로 스프레드시트에 삽입되어 SortBlobs 데이터 구조 결과표가 생성됩니다.
|