Coordinate Systems
The three coordinate systems used in calibration are depicted in the figure below.
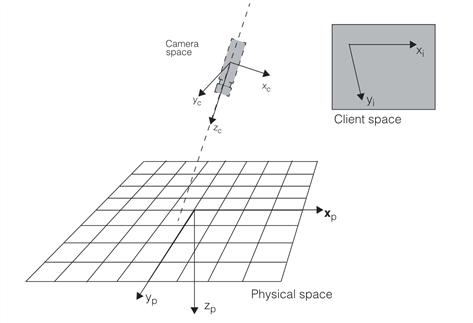
Calibration coordinate systems
xc, yc, zc is the camera coordinate system and xp, yp, zp is the physical coordinate system. Both are 3D, right-handed, rectangular coordinate systems. These coordinate systems do not have skew or aspect. The zc axis of the camera coordinate system points towards the object viewed by the camera. The physical space zp axis points away from the camera. The transformation between physical space and camera space is a 3D rigid transformation composed of rotation and translation.
For 2D camera calibration in which a checkerboard calibration plate is used to provide the feature correspondence data, the 2D physical coordinate system defined by xp and yp corresponds to the Plate2D coordinate system. The 3D physical coordinate system in this case is the extension of Plate2D with the zp axis.
Client space is a 2D coordinate system. Client coordinates are transformed by the client coordinate transform that is part of the pel buffer. For many applications this client coordinate transform is an identity transform, in which case image coordinates are the same as client coordinates. These coordinates may contain skew and aspect.