Ways to Use 2D Transformations
In general, a 2D transformation is a mathematical mapping that enables you to map points from one place to another. 2D transformations can be used (and thought of) in a number of different ways. Each of these ways are mathematically equivalent; the difference is one of interpretation.
- A transformation can be used to transform data; that is, to change the 2D coordinates of some geometrical entity within an existing coordinate frame. For example, imagine a planar shape held beneath a camera by a movable machine. Attached to this camera there is a coordinate frame and the planar shape held beneath it is described in that frame. In this case, a transformation describes a motion that the machine makes to change the appearance of the planar shape. It allows you to express the new shape in terms of the old.
- A transformation can also be used to transform coordinate frames; that is, to change the axes in which you are measuring a fixed geometrical entity. For example, imagine that the planar shape in the example above is held fixed and that the camera (and the coordinate frame attached to it) moves instead of the shape. In this case the transformation can be thought of as describing the exact motion of the measurement axes. It allows you to express the shape in the new coordinate frame in terms of how it looked in the old coordinate system.
- A transformation can be used to map data measured in two different coordinate frames. For example, imagine that the machine mentioned above has no moving parts at all, but has two cameras instead. In this case, the transformation can be thought of as describing the fixed relationship between the two cameras. It allows you to express the shape as seen from one camera in terms of its appearance in the other camera. In the figure below the two cameras are translated and rotated with respect to each other and you can use a 2D transformation to map image features in camera A to the corresponding features in camera B.
The figure below illustrates an example of these two ways to conceptualize a 2D transformation. In (a) the device is rotated by +50° with respect to the origin of the reference frame attached to the camera, which is kept fixed. In (b) the reference frame attached to the camera is rotated by -50° and the device is fixed. The two situations are equivalent. Consider, for example, the point P in the figure: xP’ = x’P and yP’ = y’P.
![]()
Transforming data as opposed to transforming coordinate frames
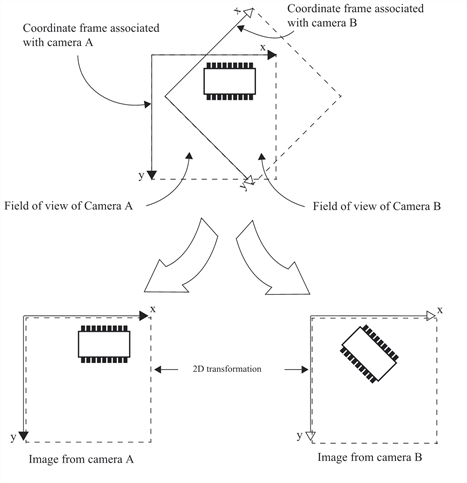
Mapping data between two coordinate frames
The mapping between image coordinate system and robot manipulator coordinate system discussed in the introduction is another example of 2D transformation as a mapping between coordinate frames.
Whether you think of moving the device (as in interpretation 1) or the reference frame (as in interpretation 2) or neither (as in interpretation 3), the intent is exactly the same: a transformation allows you to transform one view of the data to become a second view. The mathematics is also the same: the same transformation matrix representation is used regardless of which way you think. The only difference is in the way you specify and interpret the transformation. For example, if you move the reference frame to the right, that is the same as moving the object to the left. Either way you get the same initial picture, the same final picture, and the same mathematical transformation. If you want to know whether this transformation specifies a move to the left, or a move to the right, you need to know whether you are thinking of moving the object or the reference frame. This problem of interpretation affects both the direction of the motion and the order in which multiple motions are made.