2D Transformations
A typical problem in machine vision is the one of mapping image features between coordinate frames. Suppose, for example, that the task of your machine vision application is to inform a robot manipulator of the position of a device as illustrated in the figure below.
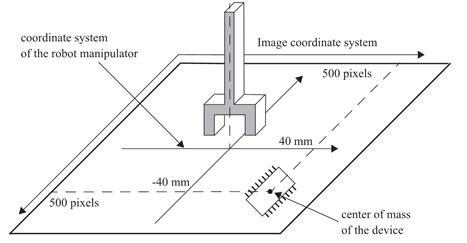
Mapping the center of mass of the device from image coordinate system to robot coordinate system
To accomplish this task the camera acquires an image of the platform and the machine vision tools locate the center of mass (CM) of the device. Before passing the information to the robot manipulator the application must solve one more problem: the CM coordinates are expressed in pixels in the coordinate frame of the machine vision application (the image coordinate system in the figure) while the robot manipulator has a coordinate system which is calibrated in millimeters. Furthermore, the vertical axis of the manipulator is not coincident with the vertical axis of the image coordinate system. In the figure above the image coordinates of CM are (500, 500), while its manipulator coordinates are (40, -40). In order to describe the position of the device in units meaningful to the manipulator the application must transform the CM coordinates from the image coordinate system to the coordinate system of the robot manipulator. Such mapping is performed by a 2D transformation.