Assembly Guided Pick
Assembly Guided Pick refers to a type of machine design in which the picking device such as robot adjusts its own position first, then picks up the first part and moves it over to the second part to assembles them together. In this type of design, the motion parameters allow the robot to pick the part at the pick-station correctly at vision system's guidance. After the part is picked, the part is placed on another part at the place-station by moving the robot to a fixed position that is established during training. The part is picked in such a fashion that following assembly the assembled part has the desired assembly characteristics.
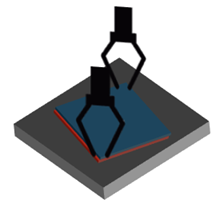
This is illustrated below. As an example assume that Part A is placed on a stationary platform. It can be picked up by a gripper which is mounted on a robot end of arm or a gantry. The gripper can move in translation(X, Y) as well as rotate itself(Ɵ). Also, let's assume that Part B is placed and held securely on a platform and thus is considered to be stationary. Based on the feedback from the vision system, the gripper adjusts its own position first, then picks up Part A and places it on Part B.
-
Step 1: Part B is randomly placed on platform. Part B's pose is then detected by the vision system.
-
Step 2: Part A is randomly placed on another stationary platform; Part A’s pose is also detected by the vision system.

-
Step 3: Gripper adjust its own position based on vision system feedback to then pick Part A.

-
Step 4: The gripper moves Part A over Part B and then places part A onto Part B at a fixed trained position.