Assembly Blind Transfer
Assembly blind transfer refers to a type of machine design with a fixed part transfer mechanism to assemble two parts. The necessary motion movement is first obtained from the vision system using either Golden Pose or Paired Features assembly modes. Then, the assembly related motion device executes the received feedback. Finally, a separate transfer mechanism will transfer the parts to be assembled. This is illustrated below.
As an example, assume that Part A is placed on a stage that can move Part A in translation(X, Y) as well as rotate Part A(Ɵ). Also, let's assume that Part B is placed and held securely on a platform and thus is considered to be stationary. A fixed transfer mechanism carries one part to the other.
Blind transfer from stage to stationary platform
-
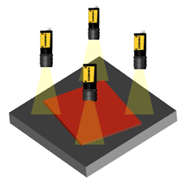
Step 1: Part B is randomly placed on a stationary platform. Part B's pose is then detected by the vision system.
-
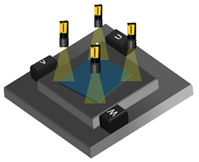
Step 2: Part A is randomly placed on stage; Part A’s pose is also detected by the vision system.
-
Step 3: For Paired Features assembly mode, stage adjusts Part A position to fit the detected pose of Part B. For Golden Pose mode assembly applications, the vision system calculates the required motion move using information from Part A and Part B trained golden poses and detected poses.
-
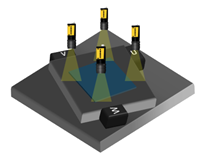
Step 4: Part A is blindly transferred from stage onto Part B’s stationary platform. The machine is designed such that the transfer mechanism is highly repeatable.
This process could also be done the opposite: Part B is blindly transferred to Part A’s side.
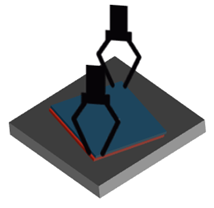
Blind transfer from gripper to stationary platform
-
Step 1: Part B is randomly placed on platform. Part B's pose is then detected by the vision system.
-
Step 2: Part A is picked by the gripper in a random pose; Part A’s pose is then detected by the vision system.

-
Step 3: For Paired Features assembly mode, the robot adjusts Part A position to fit the detected pose of Part B. For Golden Pose mode assembly applications, the vision system calculates the required motion using information from Part A and Part B trained golden poses and detected poses. The robot then adjusts Part A position based on the feedback from the vision system.

-
Step 4: Part A is blindly transferred to Part B’s stationary platform to be assembled onto Part B.