Align to Gripper
Align to Gripper: Alignment applications wherein the part is placed on a stationary platform waiting for being either picked up by gripper or a processing operation to be carried out. During alignment, the gripper mounted on a robot or the processing unit such as a dispensing head mounted on a gantry adjusts its own position after being directed by the vision system, so that the relationship of the motion device to the run-time part on the platform is the same as one established during a training step.
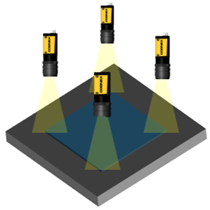
Train Time
-
Vision train golden pose using features' current locations or other references such as camera centers.
-
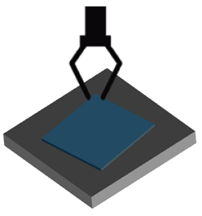
Gripper's best position to pick up the part is manually trained and saved by engineer. This pose is also sent to vision for run-time pose computing.
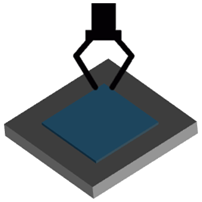
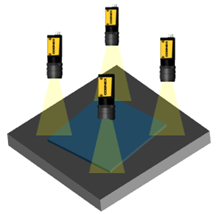
Run Time
-
Vision calculate the features differences between train time and run time and feedback to gripper the new position to pick the run time part.
-
Gripper adjust its pose to fit current part pose, and then pick it up.