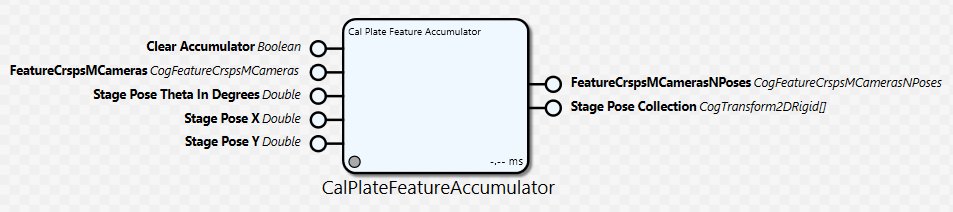
Cal Plate Feature Accumulator
The purpose of this block is to accumulate stage poses and the correspondence data extracted from a calibration target at those poses. Each time the block is executed, it adds the data from its input pins to a set of accumulated data, and outputs the current contents of the accumulated data on the output pins.
If the block is executed with a value of true on the Clear Accumulator pin, the accumulated data is cleared, then the current inputs are accumulated.
General Information
Class name: FeatureAccumulatorBlock
Namespace: Cognex.Designer.AlignPlus.Calibration
Assembly: Cognex.Designer.AlignPlus.Calibration.dll
Inputs
|
Name |
Type |
Description |
|---|---|---|
|
Clear Accumulator |
Boolean |
If true, the accumulator will first be cleared during execution of the block before accumulation of the other inputs. |
|
FeatureCrspsMCameras |
CogFeatureCrspsMCameras |
The correspondence pair data from a set of cameras. It is expected that this input will be connected to the FeatureCrspsMCameras output pin of the CheckerGridFeatureExtractor block. |
|
Stage Pose Theta In Degrees |
Double |
The rotation component (in degrees) of the stage position used to collect the correspondence data. |
|
Stage Pose X |
Double |
The X component of the stage position used to collect the correspondence data. |
|
Stage Pose Y |
Double |
The Y component of the stage position used to collect the correspondence data. |
Outputs
|
Name |
Type |
Description |
|---|---|---|
|
FeatureCrspsMCamerasNPoses |
CogFeatureCrspsMCamerasNPoses |
The accumulated of FeatureCrsps for all cameras at multi stage positions |
|
Stage Pose Collection |
CogTransform2DRigid[] |
The accumulated stage pose data. |
Properties
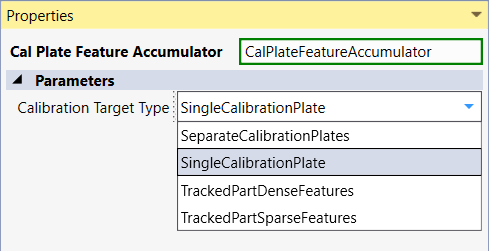
Calibration Target Type:
-
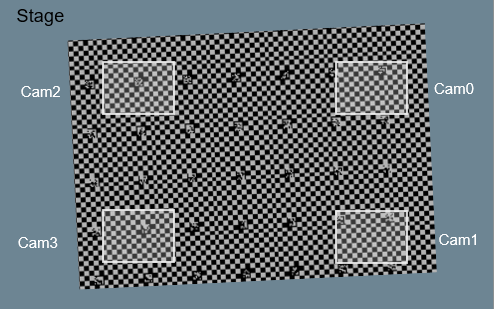
Separate Calibration Plates
Indicates that a separate calibration target is being used for each camera. In this mode, the checkerboard is used to compute lens and perspective distortions, but the motion device is used to compute the relative and absolute positions of each camera in Home2D. The accuracy of this computation depends upon the accuracy and extent of the rotation during the calibration process. The user should use this option only if a single calibration target cannot be used for the application.
-
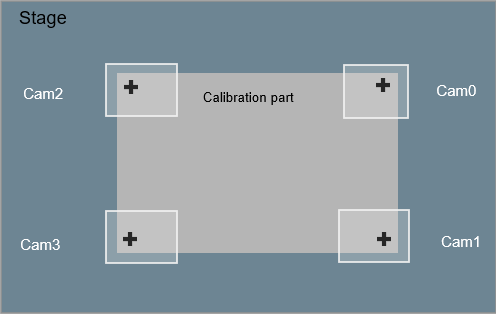
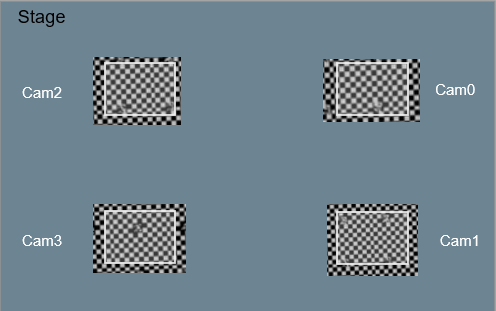
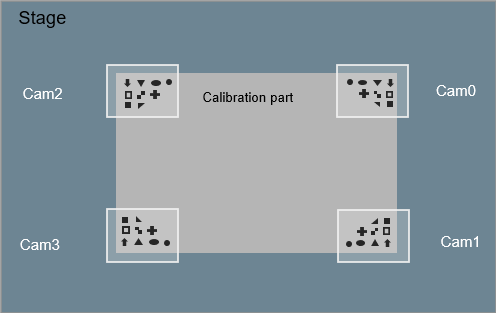
Single Calibration Plate
Indicates that a single calibration target is being used to hand-eye calibrate the multiple cameras. Following calibration, all cameras would have the ability to map their features to a common Plate2D. The relative position of the cameras are estimated accurately. The absolute cameras positions in Home2D is influenced by the accuracy and extent of rotation during the hand-eye calibration process.
-
Tracked Part Dense Features
Used when the number of fiducial tracked during the hand-eye calibration process is more than three.
-
Tracked Part Sparse Features
Used when the number of fiducial marks is at-least one but less than three.