配置自动标定设置
要配置自动标定设置,请完成以下步骤:
- 单击设定导航窗格中的传感器。
-
单击
 ,以打开“高级设定”对话框。
,以打开“高级设定”对话框。
-
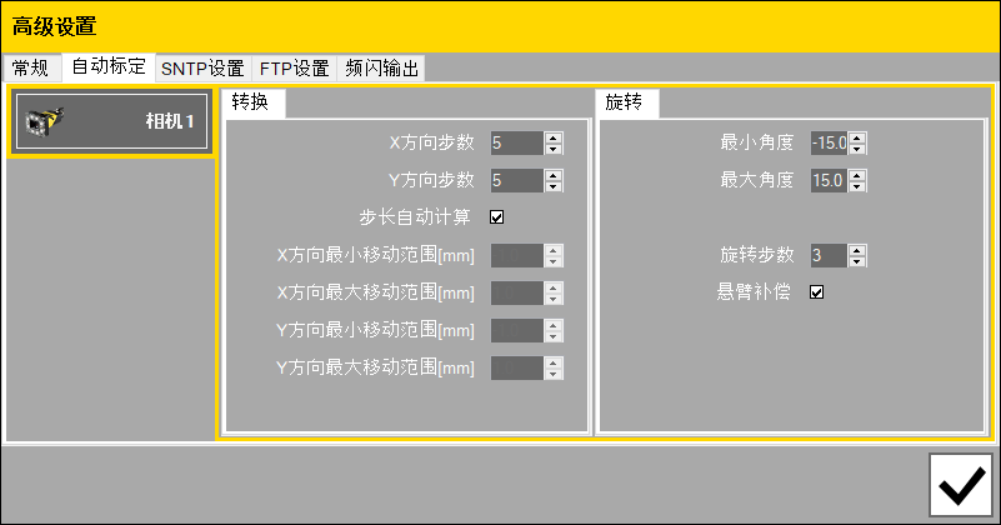
单击“自动标定”选项卡。
-
(可选)要确定部件在自动标定期间如何移动,请调整“转换”和“旋转”选项卡上的设置。在大多数情况下,您可以使用应用的默认设置。
在自动标定期间,部件沿 x 轴 和 y 轴移动,然后根据您在“自动标定”选项卡上指定的设置进行旋转。
Note: 已训练模板的原点必须位于训练区域的中心(默认)。手动将原点移离中心可能会导致自动标定失败。如果对位应用需要将原点移离区域中心,则应将单独的配方用于标定。转换设置
设置 说明 X 方向步数 指定沿 X 轴移动的步数(默认值 = 5)。 Y 方向步数 指定沿 Y 轴移动的步数(默认值 = 5)。 步长自动计算 选中此复选框可自动计算每个步长。默认情况下,此复选框已选中。如果取消选中“步长自动计算”复选框,则需要在“移动范围 X”和“移动范围 Y”文本框中手动指定部件的移动范围。 X 方向最小移动范围 [mm] 根据提供给 ACB 命令以作初始化自动标定的起始位置,手动指定沿 x 轴的移动范围下限。
 示例
示例
如果提供给 ACB 命令的位置,其 X 坐标值是 x,并且 X 方向最小移动范围文本框中的值是 -20,则移动范围的下限是 x-20。
Note: 如果选中步长自动计算复选框,则将禁用此设置。X 方向最大移动范围 [mm] 根据提供给 ACB 命令以作初始化自动标定的起始位置,手动指定沿 x 轴的移动范围上限。
示例
如果提供给 ACB 命令的位置,其 X 坐标值是 x,并且 X 方向最大移动范围文本框中的值是 20,则移动范围的上限是 x+20。
Note: 如果选中步长自动计算复选框,则将禁用此设置。Y 方向最小移动范围 [mm] 根据提供给 ACB 命令以作初始化自动标定的起始位置,手动指定沿 y 轴的移动范围下限。
示例
如果提供给 ACB 命令的位置,其 Y 坐标值是 y,并且 Y 方向最小移动范围文本框中的值是 -20,则移动范围的下限是 y-20。
Note: 如果选中步长自动计算复选框,则将禁用此设置。Y 方向最大移动范围 [mm] 根据提供给 ACB 命令以作初始化自动标定的起始位置,手动指定沿 y 轴的移动范围上限。
示例
如果提供给 ACB 命令的位置,其 Y 坐标值是 y,并且 Y 方向最大移动范围文本框中的值是 20,则移动范围的上限是 y+20。
Note: 如果选中步长自动计算复选框,则将禁用此设置。旋转设置
设置 说明 最小角度 根据提供给 ACB 命令以作初始化自动标定的起始位置,指定旋转范围的最小角度(默认值 = -15)。
最大角度 根据提供给 ACB 命令以作初始化自动标定的起始位置,指定旋转范围的最大角度(默认值 = 15)。
旋转次数 指定旋转的次数(默认值 = 3)。 悬臂补偿 选中此复选框可自动计算并应用转换移动,以将已训练特征重新置于相机视野中。默认情况下,此复选框已选中。
当标定目标安装在带悬臂的机器臂上时,请使用此设置。这意味着已训练特征将远离旋转中心。旋转开始后,小旋转角度便可将已训练特征移动到相机视野之外。如果选择“悬臂补偿”选项,则可以将已训练特征带回相机视野,然后继续执行标定过程。
- 要确认设置并退出“高级设定”对话框,请单击
 。 您已配置自动标定设置,现在可开始运行自动标定命令。
。 您已配置自动标定设置,现在可开始运行自动标定命令。